 2016, Vol. 48
2016, Vol. 48



非均匀多采样率系统是工业控制中很重要的一类系统,受各种条件的限制,例如,时基抖动、人工采样、数据丢失或传输延迟等,系统的输入信号和输出信号分别采用不同的非均匀采样频率.在实际系统中,如果输入信号采用了快速刷新周期信号,输出信号采用了慢速周期采样信号,且输出信号采样周期等于输入信号刷新更新周期(框架周期)的系统,这类特殊的非均匀采样系统,属于多采样率系统的一种.
针对非均匀周期采样的离散线性系统,文献[1-3]针对含有白噪声和有色噪声的非均匀采样线性系统,分别采用辅助模型和提升技术,解决了其辨识问题,并对算法的收敛性进行了研究;文献[4]基于递阶辨识原理,利用非均匀周期采样系统的输入输出数据,解决了输入信号为多变量的非均匀采样线性系统建模问题;文献[5]使用提升方法构造了多率系统的模型,并参考了文献[6-7]子空间辨识建模方法.此外,针对非均匀采样线性系统,一些研究者还在网络控制系统辨识[8],系统状态估计[9],广义预测控制[10-11], 信号处理[12-13], 故障诊断[14]等领域给出了新的研究结果.
本文从模糊模型出发,研究非线性系统在非均匀采样条件下的辨识问题.首先,在非均匀采样情况下,描述了非线性系统和线性系统的离散模型,建立了非线性系统和线性系统之间的联系; 其次,在上述关系的基础上,将提升变量作为模糊模型的输入变量,建立非均匀多采样率非线性系统的模糊模型;然后,利用竞争学习和递推梯度下降算法进行结构辨识和参数辨识.通过定理证明,输入信号在遍历和持续激励条件下,模糊模型参数能够一致收敛;化工pH中和过程是一个非常复杂的非线性过程,采用现场的非均匀采样数据对其进行模糊建模,证明了所提方法是有效的.
1 模糊模型的建立 1.1 问题描述假设x(t)∈Rn, y(t)∈Rl, u(t)∈Rl.考虑连续的非线性函数

|
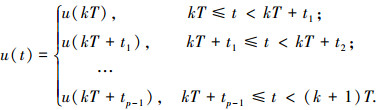
式中的控制量满足如下关系
|
式中:非均匀刷新时间间隔为τi,为采样前一时刻ti-1和后一时刻ti的差,即τi=ti-ti-1,ti=τ1+τ2+…+τi(设t0=0, tp=T),T=τ1+τ2+…+τp=tp称为更新周期(帧周期);控制量u在第k个更新周期[kT, kT+T),k=0, 1, 2, …,以t=kT+ti,i=1, 2, …, p非均匀刷新p次;输出量y以T为周期均匀采样,即在[kT, kT+T)内,y(t)=y(kT).此时,x(kT+T)是以x(kT)为初值的微分方程

|
利用提升技术,构造提升向量为

|
此时,可将原系统转换如下离散系统,即

|
(1) |
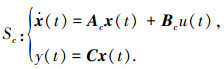
首先,考虑Sc是线性系统的情况,即
|
(2) |
式中:x(t)∈Rn为状态向量;u(t)∈R1为控制输入;y(t)∈R1为系统输出;Ac、Bc、C分别为适当维数的矩阵.由问题描述可知,量测的采样数据分别为u(kT+ti), i=0, 1, 2, …, p-1和y(kT).在一个帧周期T内对式(2)进行离散化为

|
(3) |
式中:




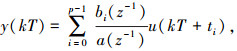
引入后移算子z-1,满足z-1u(kT+ti)=u(kT+ti-T), 或前移算子z,满足zx(kT)=x(kT+T),由式(3)可得

|
(4) |
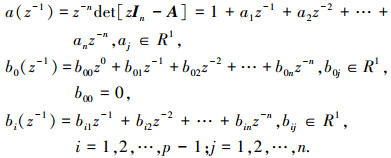
式中In为n阶单位矩阵,式(4)也可以表示为有理分式的形式:
|
其中
|
对于式(1),它与线性系统式(3)的关系是:非线性系统可以看作其有多个平衡点,多个平衡点的非线性特性可以用局部线性模型式(3)来近似,那么整个非线性系统模型可以用局部线性模型式(3)经过多个非线性加权函数的组合来表示,即

|
(5) |
其中
|
(6) |
fl[φ(kT)]为第l个非线性加权函数;gl[φ(kT)]为非线性系统在第l个平衡点处局部线性模型.对于式(5)而言,神经网络模型、模糊模型、支持向量机模型等都可以拓展成类似的形式.
1.3 模糊模型的确定对于非线性系统式(1),在进行非均匀采样后,其模糊模型为
Rl:if φ(kT)属于Fl(Fl的隶属函数为μl[φ(kT)]),

|
(7) |
式中:Fl为第l条规则下的模糊集合; μl[φ(kT)]为Fl模糊集合的隶属度函数;c为采用模糊规则的总数;φ(kT)为第kT时刻采样样本;



对于模糊模型式(7),还可以表示为如下形式:
Rl:if φ(kT)属于Fl,then

|
(8) |
最后,模型总输出为
|
(9) |
竞争学习也是一种聚类方法,在文献[15]中给予了介绍,该算法表示如下.
1) 选择聚类数c(2≤c≤N/2,N为样本总数),初始中心向量φl(l=1, 2, …, c).
2) 每一采样样本其隶属度计算为
|
式中:μl(kT)为在第kT时刻φ(kT)在第l类的隶属度,即μl(kT)为μl[φ(kT)]简写形式;φl为第l类的聚类中心向量(l=1, 2, …, c);φ(kT)表示第k次采样的样本.
3) 修正聚类中心向量φl(l=1, 2, …, c)为

|
其中η是学习系数.
4) 若
对于式(9),辨识目的是根据采样数据{u(kT+ti-1), y(kT)},(i=1, 2, …, p; k=1, 2, …, N),确定模糊模型参数alj和blij.为此,首先定义如下参数向量:
|
模糊模型的输入向量为:
|
这样,式(9)可以写成线性回归形式,由于系统总是含有噪声的,因此模糊模型最后输出可以表示为

|
(10) |
式中:
通过竞争学习得到聚类中心和隶属度函数.模糊模型的后件参数可以采用随机梯度算法来确定,算法如下:

|
(11) |

|
(12) |

|
(13) |
式中: 



为了说明算法的性能,对一些数学记号说明如下:





为了说明式(11)~(13)算法的收敛性,给出如下引理.
引理1[16] 设函数f(t)≥0,g(t)≥0,



引理2 设D∈Rm×n, E∈Rn×m, 则等式|Im+EF|=|In+FE|成立.
引理3 下列不等式成立:
|
根据式(13)的r(kT)定义,并且r(kT)是递增的,很容易证明上述引理.
定理1 对于式(10),假定噪声信号v(kT)是定义在概率空间(Ω, F, P)上的鞅差序列,对于递增σ代数序列{FkT, k∈N},其在kT时刻可观测到,并满足条件:

|
令



|
证明 由于论文篇幅的限制,此处略.
3 仿真实例为了验证本文方法的有效性,对化工非线性对象pH的中和过程进行研究.pH控制系统的中和反应过程,如图 1所示[17].

|
图 1 pH中和反应过程 |
图 1中,酸液、缓冲液、碱液在反映池内发生中和反应,其溶液为:酸液HNO3;缓冲液NaHCO3;碱液NaOH,碱液NaHCO3.q1、q2、q3分别是酸液、缓冲液、碱液化学液剂的流量;q4是输出液的流量;pH4是输出液pH的测量值; Wa1、Wa2、Wa3、Wa4分别是这些化学液剂的电荷平衡因子;Wb1、Wb2、Wb3、Wb4分别是这些化学液剂的物料平衡因子.
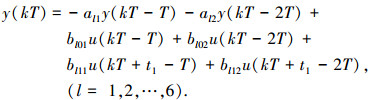
用碱流q3作为控制量u,p=2,t1=τ1=1.0 min,τ2=1.5 min,T=τ1+τ2=2.5 min.输出液pH测量值作为输出量y.选y(kT-T)、y(kT-2T)、u(kT-T)、u(kT-2T)、u(kT+t1-T)和u(kT+t1-2T)构成向量φ(kT).取模糊模型的规则数c=6,模糊模型具体形式如下:
Rl:if φ(kT)属于Fl,then
|
从现场得到60个数据进行竞争学习,建立pH控制系统的中和反应过程的模糊模型.仿真结果如下:图 2给出了模糊模型的输出和实际输出结果的比较;图 3为误差比较曲线,均方差为0.155,显然模糊模型能够很好反映pH控制系统的中和反应非线性非均匀采样过程,具有计算简便、建模方便、高效的特点.

|
图 2 模糊模型的输出和实际输出结果的比较 |

|
图 3 误差比较曲线 |
1) 利用竞争学习确定模糊模型的前件结构;通过随机梯度算法确定模糊模型的后件参数;通过定理和引理证明了模糊辨识算法的收敛性能.通过化工过程pH中和非均匀采样过程研究,证明了所提出方法有效性.
2) 对于含有框架周期,输入信号的刷新时间不确定、随机的、非均匀采样的非线性系统的辨识(这种情况在网络控制系统,工业系统中,也是经常出现的)仍是困难的,主要困难表现在,由于输入信号的刷新时间不确定,使得系统离散模型难于建立,因此不能采用基于离散模型的方法辨识.
| [1] |
刘艳君, 谢莉, 丁锋. 非均匀采样数据系统的AM-RLS辨识方法及仿真研究[J]. 系统仿真学报, 2009, 21(19): 6186-6189. |
| [2] |
XIE L, LIU J, YANG H Z, et al. Modelling and identification for non-uniformly periodically sampled-data systems[J]. IET Control Theory and Applications, 2010, 4(5): 784-794. DOI:10.1049/iet-cta.2009.0064 |
| [3] |
DING Feng, LI Qiu, CHEN Tongwen. Reconstruction of continuous-time systems from their non-uniformly sampled discrete-time systems[J]. Automatica, 2009, 45(2): 324-332. DOI:10.1016/j.automatica.2008.08.007 |
| [4] |
丁锋, 陈通文, 萧德云. 非均匀周期采样多率系统的一种辨识方法[J]. 电子学报, 2004, 32(9): 1414-1420. |
| [5] |
LI Weihua, HAN Zhengang, SHAH S L. Subspace identification for FDI in systems with non-uniformly sampled multirate data[J]. Automatica, 2006, 42(4): 619-627. DOI:10.1016/j.automatica.2005.11.010 |
| [6] |
VERHAEGEN M. Identification of the deterministric part of MIMO state space models given in innovations from input-output data[J]. Automatica, 1994, 30(1): 61-74. DOI:10.1016/0005-1098(94)90229-1 |
| [7] |
Van OVERSCHEE P, De MOOR B. N4SID:subspace algorithm for the identification of combined deterministic-stocastic system[J]. Automatica, 1994, 30(1): 75-93. DOI:10.1016/0005-1098(94)90230-5 |
| [8] |
WANG Jiandong, ZHENG Weixing, CHEN Tongwen. Identification of linear dynamic systems operating in a networked environment[J]. Automatica, 2009, 45(12): 2763-2772. DOI:10.1016/j.automatica.2009.09.021 |
| [9] |
蒋红霞, 丁锋. 一类非均匀采样数据系统的状态估计[J]. 科学技术与工程, 2008, 8(2): 513-514. |
| [10] |
SHENG Jie, CHEN Tongwen, SHAH S L. Generalized predictive control for nonuniformly sampled systems[J]. Journal of Process Control, 2002, 12(8): 875-885. DOI:10.1016/S0959-1524(02)00009-4 |
| [11] |
SHENG Jie, CHEN Tongwen, SHAH S L. Generalized predictive control for non-uniformly sampled systems[J]. Journal of Process Control, 2002, 12(8): 875-885. DOI:10.1016/S0959-1524(02)00009-4 |
| [12] |
KAZAKOV, V A. Non-uniform sampling and reconstruc-tion of stochastic processes with the limited number of sam-ples[J]. WSEAS Transactions on Systems, 2006, 5(8): 1777-1784. |
| [13] |
LUO Junyi, LEI Lin. Periodic non-uniform sampling for sparse signals in shift-invariant spaces[J]. International Journal of Hybrid Information Technology, 2015, 8(12): 421-432. DOI:10.14257/ijhit |
| [14] |
WAN Yiming, WANG Wei, YE Hao. Discrete time-varying fault detection filter for non-uniformly sampled-data systems[J]. Science China Information Sciences, 2014, 57(3): 1-11. |
| [15] |
CHUN F L, LEE T. Fuzzy competitive learning[J]. Neural Networks, 1994, 7(3): 539-551. DOI:10.1016/0893-6080(94)90111-2 |
| [16] |
GOODWIN G C, SIN K S. Adaptive Filtering Prediction and Control[M]. New York, NY: Dover Publications, Inc, 1984.
|
| [17] |
张智焕, 王树青. 基于多模型pH非线性过程的预测控制[J]. 浙江大学学报:工学版, 2002, 36(1): 29-31. |