 2016, Vol. 48
2016, Vol. 48



网络控制系统中存在的时延、数据丢包等问题严重影响系统的整体性能[1-2].其中,控制回路的采样周期直接影响着网络控制系统的控制性能.控制性能的提高希望较小的采样周期,但是采样周期的减少会降低网络带宽利用率,进而影响网络的服务质量[3-4].因此,如何在控制性能和网络服务质量之间取得折中,是目前设计网络控制系统采样周期调度算法时主要考虑的问题[5].
早期的调度算法确定的采样周期在系统运行中是不变的,无法根据网络中信息流的变化实时调整,这样就导致初始确定的回路采样周期无法适应实际的变化,这些算法包括Branicky等[6]提出的RM(rate monotony)调度算法、Luo等[7]提出的EDF(earliest deadline first)动态调度算法、Otanez等[8]提出的死区调度算法等.由于固定采样周期调度算法具有上述缺点,因此很多学者在变采样周期调度算法方面进行了大量的研究.但是这些研究成果仍存在着一些缺点,比如需要精确知道网络的负载情况[9-10]、缺少对采样周期上下限的讨论与分析[11-14]、算法中关键参数难以确定[15-16]、缺少相关指标分析等.
上述学者提出的变采样周期调度算法没有考虑每个控制回路权重的影响.对于实际的控制系统,如果能给出控制回路权重的确定法则,结合该权重进行带宽的合理分配,对于提高网络控制系统整体性能是有益的.文献[17]中提出了控制回路权重的概念,但是该文并未给出合理的权重分配机制,仿真中将各回路权重都设置为1,这样与普通的变采样周期算法不存在本质的区别.基于以上描述,本文选择二次平方根作为映射函数,通过控制回路中数据包的传输误差确定了控制回路的动态权重调整策略.同时考虑到实际网络中数据包传输时间是变化的,利用最小二乘支持向量机算法预测未来时刻数据包的传输时间.最后通过控制回路的权重动态调节网络带宽,结合预测的数据包传输时间,动态的调整各回路的采样周期,达到提高网络控制系统性能的目的.
1 问题描述网络控制系统中的网络资源是被多个任务共享的,因此,回路的采样周期会极大的影响系统整体性能.图 1描述了控制系统采样周期对系统性能的影响.图中给出了采样周期与连续控制系统、离散控制系统、网络控制系统性能的关系.

|
图 1 采样周期对控制系统性能的影响 |
由图 1可看出,只有在中间的一个区间内,网络控制系统的性能才可接受.因此对于网络控制系统,各回路的采样周期应该进行动态地调节,使采样周期落在合理的区间之内,这样才能改善系统的性能.
这里,本文对采用的控制系统作以下说明:1)传感器驱动方式为时间驱动,控制器和执行器驱动方式为事件驱动;2)只有最新的采样值才保留于传感器队列中; 3)网络调度需要采用的网络具有优先级策略,因此本文选择CAN网络作为研究对象.
2 控制回路动态权重分配策略由多回路构成的网络控制系统,控制回路的权重系数可分为静态权重与动态权重.静态权重的设置依据为系统判断各个控制回路对系统性能的影响大小给出的权重值;而动态权重是根据需要的目标函数,利用函数映射而得的不断动态调整的一个权重值.
本文的权重策略是通过误差动态的进行调整[18],通过控制回路权重值的动态变化来优化目标值.对某个控制回路i来说,其权重系数为

|
(1) |
式中ω0i(k)为静态权重,由决策者根据任务的相对重要性而给出.系统的静态权重可表示为

|
Δωi(k)为动态补偿权重,其意味着利用回路的控制性能作为目标函数,对静态权重的动态补偿,表示为

|
其中

|
式中:max ω为最大权重系数, Δωmin为动态补偿权重系数的最小值.
Δωi(k)通过被控对象的状态与合适的函数映射, 经过变换可得到动态权重系数.文献[19]利用CAN总线的调度问题作为研究对象,提出3种函数映射关系.文献[20]在文献[19]基础上,仿真验证了二次平方根映射函数具有更好的性能,本文采用二次平方根映射函数,其映射曲线如图 2所示.

|
图 2 二次平方根映射函数 |
|
式中|ei(k)|s为动态补偿权重饱和时的误差.通过该映射函数得到动态补偿权重Δωi(k+1), 利用式(1)计算得到最终的权重系数ωi(k+1).
本文给出该二次平方根映射函数的有效性的分析.定义多回路共享网络时回路调度的属性参数为

|
(2) |
式中:Ji为采样周期对控制性能的代价函数;hi为采样周期;ci为控制任务执行时间;Ui为控制任务的网络利用率函数.利用最优反馈调度理论解决式(2)优化问题,描述为:
|
(3) |
式中, Ur为给定网络利用率最大值.一般的,该代价函数近似为递增线性或者二次函数[20].对于最优反馈调度问题,可经过简单的函数映射关系得到动态权重,即将最优调度的结果映射为与被控对象相关的优化解.而二次平方根映射函数,通过被控对象误差与最大误差的比值,经过简单运算得到了动态权重,该权重是与被控对象状态信息相关的,通过该权重进行带宽分配可保证系统是接近最优反馈调度的.
本文的带宽分配策略根据权重对资源按照比例进行分配,需要对权重作标称值的转换.将各回路权重的标称值设为ωi(k+1), 满足

|
(4) |
由式(4)可得
|
图 3是变采样周期反馈调度器的结构图.该调度器包括网络利用率比例预测、网络带宽配置、数据包传输时间预测与采样周期计算几个环节.

|
图 3 变采样周期反馈调度器结构 |
网络利用率预测过程如图 4所示.网络利用率的定义为

|

|
图 4 网络利用率预测结构示意 |
式中:Ui为第i个回路的网络利用率;Ci为第i个回路的数据包传输时间;Ti为第i个回路的采样周期.
设网络带宽利用率的预设值为Ur,实际值为U(k),则网络带宽实际值与预设值之间的差值表示为

|
(5) |
本文使用比例控制来获得调节增量为

|
式中:KΔ为比例调节系数, 

|
考虑本文算法的网络利用率收敛性问题.网络利用率实际值与预测值之间存在一定的差值,设两者之间的比值为g(k+1),其取值范围为(0, gmax],则有
|
(6) |
实际的网络利用率为

|
(7) |
将式(6)代入式(7),有

|
(8) |
用Ur同时减去式(8)的左右两边,有

|
(9) |
将式(5)代入式(9),可得到网络利用率误差的等式为

|
记为

|
(10) |
则有

|
(11) |
定理1(可调度性)[14] 对于所研究的网络控制系统,令KΔ为比例增益,若其满足
|
则式(11)所描述的反馈调度系统是指数收敛的,网络带宽能够指数收敛到期望值,反馈调度器是可调度的.
将式(11)展开可得到

|
由矩阵理论有

|
(12) |

|
(13) |
由式(10)和g(k+1)>0可知

|
(14) |
又由式(10)和g(k+1)≤gmax可得

|
(15) |
综合式(14)和式(15),可得

|
对于任意的k,总存在一个标量ε, 0<ε<1, 使得|β(k+1)|≤ε总是成立,代入式(13)有

|
因此,当条件满足定理1时,变采样周期算法可使网络利用率收敛到期望值.
3.2 带宽分配策略本文的带宽分配原则为若传输误差与回路权重系数的乘积越大,则该回路应分配到更多的网络资源.基于上述考虑,本文网络带宽的分配方法如下.
1) 若当前各个回路的传输误差都为0.只需按照权重系数的大小来分配网络带宽.

|
(16) |
2) 若当前各个回路的传输误差都不为0.则传输误差与回路权重系数的乘积越大,该回路的网络需求度也就越大,应该分配更大的网络资源为
|
(17) |
3) 若当前存在部分回路的传输误差为0,剩余回路的传输误差不为0.则误差为0的回路可以采用较大的采样周期,本文选择Timax为传输误差为0的回路的采样周期.对于传输误差不为0的回路的带宽则按照方法2)中的原则分配.设误差为0的回路数目为m,j表示误差为0的回路,则有1≤j≤m.
|
(18) |
|
(19) |
式中
数据包传输时间可根据历史数据进行预测[21].本文将采用LSSVM算法预测控制回路未来时刻数据包的传输时间.
定义如下的数据包传输时间矢量为

|
式中:{Ci, i=1, 2, …, N}为数据包传输时间序列, N为序列的长度.
通过LSSVM算法可得k+1时刻的数据包传输时间预测值为
|
(20) |
利用数据包传输时间样本对LSSVM进行训练建模,然后通过数据包传输时间历史值结合式(20)来预测下一时刻的数据包传输时间.
3.4 采样周期计算根据上述计算得到的网络利用率以及数据传输时间,通过计算就可以得到各回路新的采样周期,其计算公式为
|
式中

为保证控制性能,控制回路的采样周期必须满足一定的约束条件.首先讨论采样周期的下限问题.采样周期下限值Tmin可以通过系统中各回路消息总的传输时间之和Tttt估计.在系统充分可调度的情况下,Tmin可以表示为[22]

|
(21) |
式中0.69是当系统消息无限的情况下,满足可调度性时的最大的比例系数.
这里讨论采样周期的上限问题,对于具有时延的网络控制系统,若其回路的采样周期满足T<Tmax时,则系统是稳定的.引入相位滞后与时延滞后, 相位滞后、时延滞后分别为:

|
式中:ω为系统频率;Ts为采样周期;Td为时延.则当采样周期满足

|
(22) |
时,系统性能稳定.如果系统的额外的时延已知,由于数字系统中没有时延引起的相位滞后,Δφ和时延滞后Δφd可以进一步表示为:
|
假设数字系统和含时延的数字系统有相同的相位滞后,即

|
因此可以得到
|
可以利用式(22)中的系统带宽来估计Ts有

|
所以采样周期的上限值Tmax可以描述为

|
(23) |
式中:Td为时延,Tbw是根据控制系统的带宽ωbw求得.其计算公式为

|
式中ωbw为闭环控制系统的bode图中幅频特性曲线下降到-3 db所对应的角频率.
4 仿真以三回路的CAN总线网络控制系统为仿真对象,设被控对象的传递函数为
|
本文控制器采用PID控制算法,比例因子K=0.96,微分系数Td=0.094,积分系数Ti=0.12.利用True Time工具箱,数据传输速率为80 kbits/s,数据包大小为40 bits,网络利用率设定值Ur=80%.控制回路初始采样周期为h1=8 ms, h2=8 ms, h3=8 ms.权重动态调节参数为:max ω=1,Δωmin=0.01,|ei(k)|s=2,ω01(k)=0.33,ω02(k)=0.33,ω03(k)=0.33.对3个回路分别采集200组数据包传输时间样本,LSSVM算法参数为:回路1中m=10,γ=1.067,σ2=61.587;回路2中m=10,γ=8.512,σ2=3.854;回路3中m=10,γ=2.574,σ2=0.852.系统中设置一干扰节点模拟实际网络负载,其带宽占用率为20%.参考信号为阶跃信号,仿真时间为1 s.首先确定本文变采样周期的上、下限,在不考虑干扰和丢包以及各回路的处理时间的最大值Tproc情况下,Tttt=2 ms,Tbw=0.4 s,Td=2 ms,由式(21)、式(23)可以计算得到:

|
由此可确定本文的变采样周期变化范围为3~16 ms.
图 5为系统网络利用率曲线,计算得知其初始网络利用率为115%,网络不可调度,从图 5中可以看出网络利用率大约经过不到0.3 s的时间能够收敛到设定值80%,仿真结果表明,本文的变采样周期调度算法能够使得网络利用率收敛到设定值.

|
图 5 网络利用率曲线 |
图 6为采样周期变化曲线.由于本文中各个回路分配的网络带宽以及数据包传输时间都是变化的,因此3个控制回路的采样周期将随系统运行情况而变化,图 6中采样周期16 ms的峰值是对应的回路传输误差为零的时刻.

|
图 6 采样周期变化曲线 |
与文献[9]中的基于模糊反馈的变采样周期调度算法进行了对比.图 7, 8为2种调度算法3个回路的输出响应曲线.从图中可看出本文的变采样周期调度算法通过动态权重调整策略改变采样周期,系统将会对回路3分配更多的资源,提高了回路3的性能,同时并未影响回路1、2的性能.

|
图 7 文献[9]中调度算法的输出曲线 |

|
图 8 本文变采样周期调度算法的输出曲线 |
图 9, 10为文献[9]与本文的变采样周期调度算法3个控制回路的数据传输时延曲线.

|
图 9 文献[9]中调度算法的网络时延 |

|
图 10 本文变采样周期调度算法的网络时延 |
从图 9, 10的对比可看出采用本文的变采样周期调度算法时,3个控制回路的数据传输时延要小于文献[9]中的变采样周期算法,传输时延的下降说明本文的变采样周期调度算法改善了网络带宽分配,提高了网络传输效率.利用各回路绝对误差积分和(IAE)作为评价控制系统性能的指标. IAE可表示为
|
经离散后得到
|
表 1给出了EDF调度算法、固定权重的变采样周期算法、文献[9]的模糊反馈变采样周期算法以及本文动态权重变采样周期算法4种算法的IAE值,通过对比可知,相对于其他3种变采样周期调度算法,本文的变采样周期调度算法改善了系统的控制性能.
| 表 1 3种调度算法的IAE值 |
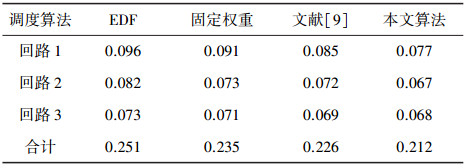
从仿真对比结果可观察到,本文的动态权重调整的变采样周期调度算法提高了网络控制系统的性能指标,其主要原因在于本文调度算法引入了动态权重的补偿策略,使控制系统的性能得到了优化.
5 结论1) 为了提高网络控制系统的性能,在网络带宽资源受限的情况下,提出一种网络控制系统动态权重调整的变采样周期调度算法.该算法利用二次平方根映射函数,结合控制回路的传输误差,对回路的权重进行动态调整.采用比例控制预测当前网络利用率,通过LSSVM算法预测回路数据包的传输时间,动态地调整各控制回路的采样周期.
2) 仿真结果表明, 该算法可以将网络利用率收敛到设定值,提高了控制回路的性能,减少了各个回路数据传输时延,同时降低了控制回路的IAE值,优化了系统的整体性能.本文提出的变采样周期调度算法对于如何提高网络控制系统的性能具有一定的理论与实际参考价值.
| [1] |
游科友, 谢立华. 网络控制系统的最新研究综述[J]. 自动化学报, 2013, 39(2): 101-118. |
| [2] |
TIAN Zhongda, GAO Xianwen, LI Kun. A hybrid time-delay prediction method for networked control system[J]. International Journal of Automation and Computing, 2014, 11(1): 19-24. |
| [3] |
FAN Jinrong, FANG Huajing. Guaranteed cost control for networked control systems with uncertain sampling period and time-delay[J]. ICIC Express Letters, an International Journal of Research and Surveys. Part B:Applications, 2012, 2(2): 501-506. |
| [4] |
李洪波, 孙增圻, 孙富春. 网络控制系统的发展现状及展望[J]. 控制理论与应用, 2010, 27(2): 238-243. |
| [5] |
WANG Zhiwen, SUN Hongtao. Bandwidth scheduling of networked control system based on time varying sampling period[C]//Proceedings of the 32nd Chinese Control Conference. Xi'an: IEEE, 2013: 6491-6495.
|
| [6] |
BRANICKY M S, PHILLIPS S M, ZHANG Wei. Schedu-ling and feedback co-design for networked control systems[C]//Proceedings of the 41st IEEE Conference on Decision and Control. Picataway, NJ: IEEE, 2002: 1211-1217.
|
| [7] |
LUO Liheng, ZHOU Chuan, CAI Hua, et al. Scheduling and control co-design in networked control systems[C]//Proceedings of the 5th World Congress on Intelligent Control and Automation. Hangzhou: IEEE, 2004: 1381-1385.
|
| [8] |
OTANEZ P G, MOYNE J R, TILBURY D M. Using deadbands to reduce communication in networked control systems[C]//Proceeding of the 2002 American Control Conference. [S. l. ]: IEEE, 2002: 3015-3020.
|
| [9] |
CHEN Huiying, LI Zuxin, WANG Peiliang. Dynamic intelligent feedback scheduling in networked control systems[J]. Mathematical Problems in Engineering, 2013. |
| [10] |
LI Z, WANG W, JIANG Y. Intelligent scheduling and optimisation for resource-constrained networks[J]. IET Control Theory and Applications, 2010, 4(12): 2982-2992. |
| [11] |
CHEN Peng, DONG Yue, ZHOU Gu, et al. Sampling period scheduling of networked control systems with multiple-control loops[J]. Mathematics and Computers in Simulation, 2009, 79(5): 1502-1511. |
| [12] |
ZHANG Hongli, JING Yuanwei, ZHANG Siying. Controller design for networked control systems with active varying sampling period[J]. Journal of System Simulation, 2009, 21(22): 7275-7280. |
| [13] |
WANG Yulong, WANG Tianbao, CHE Weiwei. Active-varying sampling-based fault detection filter design for networked control Systems[J]. Mathematical Problems in Engineering, 2014(3): 1-9. |
| [14] |
CHEN Liang, ZHANG Jianming, WANG Shuqing. Schedu-ling and control co-design for delay compensation in the networked control system[J]. Asian Journal of Control, 2006, 8(2): 124-134. |
| [15] |
XIA Feng, SUN Youxian, TIAN Yuchu. Feedback scheduling of priority-driven control networks[J]. Computer Standards and Interfaces, 2009, 31(3): 539-547. |
| [16] |
戴小溪, 刘爱伦. 一种新的变采样周期策略在不确定负载NCS中的应用[J]. 华东理工大学学报, 2012, 38(1): 95-101. |
| [17] |
YANG Yingze, GUI Weihua, HUANG Zhiwu. A multi-task real-time scheduling algorithm based on dynamic weight compensation and adaptive task Jumping[C]//Proceedings of the 2009 International Conference on Networking and Digital Society. Washington, DC: IEEE Computer Society, 2009: 229-232.
|
| [18] |
田中大, 高宪文, 史美华, 等. 资源受限网络控制系统的模糊反馈调度[J]. 电机与控制学报, 2013, 17(1): 94-101. |
| [19] |
JUANOLE G, GERARD M. Networked control systems:definition and analysis of a hybrid priority scheme for the message scheduling[J]. Embedded and Real-Time Computing Systems and Applications, 2007, 1(2): 267-274. |
| [20] |
LI Feng, WEI Hongxing, WANG Tianmiao, et al. Dynamic weights feedback scheduling of resource-constrained real-time control systems[C]//Proceedings of the WCICA 7th World Congress on Intelligent Control and Automation. Chongqing: IEEE, 2008: 2747-2751.
|
| [21] |
田中大, 高宪文, 石彤. 用于混沌时间序列预测的组合核函数最小二乘支持向量机[J]. 物理学报, 2014, 63(16): 160508(1-11). |
| [22] |
RAZEGHI-JAHROMI M, SEYEDI A. Stabilization of distributed networked control systems with minimal communications network[C]//Proceedings of the 2011 American Control Conference. San Francisco, CA: IEEE, 2011: 515-520.
|