 2016, Vol. 48
2016, Vol. 48



射频识别RFID(radio frequency identification)技术是20世纪90年代开始兴起的一种自动识别技术,通过近场耦合或远场耦合方式可以实现阅读器与标签之间的非接触双向数据通信.相比于传统的条码识别技术,RFID技术无需人工干预即可完成信息的输入和处理,且具有更大的存储容量,因此广泛应用于运输、医疗、防伪、跟踪、设备和资产管理等领域[1-2].
目前,无线室内定位是RFID技术的一个重要应用领域,现有基于RFID的室内定位研究主要围绕LANDMARC系统开展[3-6]. LANDMARC系统的核心思想是通过引入位置固定的有源参考标签动态捕捉环境信息,计算定位标签和参考标签在多个阅读器上的场强欧式距离,依据经验残差算法对近邻参考标签的位置加权,进而完成定位标签的位置估计.典型的LANDMARC定位系统采用RF Code公司的Spider射频模块搭建,由阅读器和有源标签两部分组成,工作频率为308 MHz.其中,阅读器具备8个可测功率能级,功率能级1对应最小的识别范围,功率能级8对应最大的识别范围,阅读器通过检测接收到的有源标签的信号强度,完成对定位标签的信息读取等操作.
近年来,得益于无源超高频RFID技术的迅速发展,为进一步降低系统成本、降低标签的体积以增强系统的适用性,越来越多的研究人员搭建了基于915 MHz的无源LANDMARC定位系统,并提出了相应的改进措施.文献[7]提出一种收信场强矫正机制以剔除无用的参考标签.文献[8]采用Intel公司的R1000开发平台分析算法性能,因此定位精度较高.文献[9]充分发挥R1000平台的多路射频端口和二次开发优势,采用多天线复用串行工作方式替代多阅读器并行工作方式进一步降低了系统成本,并提出了动态k值设定机制和误差校正机制.
现有基于UHF RFID的无源LANDMARC定位相关研究主要以提高定位精度为目标,而对定位系统的工作效率分析较少,因此系统性能的评价方式也较为简单,实际指导意义略差.针对上述问题,本文结合路径损耗模型,依据阅读器最大功率能级、参考标签布设密度对无源LANDMARC算法的定位精度及定位效率进行量化分析,提出一种适用于无源LANDMARC定位系统的定位性能评价方法.
1 无源LANDMARC算法的定位原理现有射频阅读器并不能提供标签的连续、准确的收信场强值,只能依据离散的功率能级提供环境场强信息.在无源定位初始阶段,阅读器将发射功率调至最大,即以最大功率能级工作,当标签收到阅读器的连续波请求信号后,激活自身电路,并回发应答信号.阅读器收到应答信号后,逐级降低功率能级,当不能再继续收到标签应答信号时,则认定当前功率能级为标签的收信场强指示.假设定位环境中共有U个阅读器,依据LANDMARC算法原理,对于第l次定位过程,第i个定位标签的位置可以估计为

|
(1) |

|
(2) |

|
(3) |
式中参数意义如表 1所示.
| 表 1 无源LANDAMRAC算法参数设置 |

为研究无源UHF RFID定位系统中功率能级对系统定位性能的影响,依据文献[10]中的式(11),首先建立基于辐射半径的阅读器功率能级映射模型,可以得到
|
(4) |
式中:Pr表示无源标签接收到的信号功率;Pt表示阅读器的发射功率;R表示Pt对应的读写区域辐射半径;R0表示参考距离;Gr、Gt分别表示阅读器和标签的天线增益;ε表示路径损耗指数,表 2列出了典型室内环境下ε的参考值.
| 表 2 室内常见情况下路径损耗指数ε参考值 |

对式(4)两边取对数运算,可得

|
(5) |
对式(5)展开有

|
(6) |
设定阅读器最大发射功率为Ptmax,最大功率能级、最小功率能级分别为1、Gmax,定义相邻功率能级的功率步长为Ip,单位dBm.显然,当功率能级为i时,阅读器的发射功率可以表示为

|
(7) |
其中i∈[1,Gmax].结合式(6)、式(7),可得功率能级为i时的无源标签理想收信功率为
|
(8) |
针对室内环境中由人为扰动和障碍物阻挡引起的幅度衰落,使得无源标签收信功率降低进而造成的漏读现象,本文引入服从正态分布、期望为0、标准差为σ的高斯白噪声Xσ对式(5)中的无源标签收信功率进行修正,从而有

|
(9) |
其中Pr′为无源标签的实际收信功率.结合式(8)、(9),可得到功率能级为i时的无源标签实际收信功率为

|
依据文献[11]中的式(4),设定标签激活门限值Prth,则若满足Pir′≥Prth,读写区域内的无源标签即可激活,从而可得当前功率能级条件下的读写区域辐射半径为

|
为便于分析说明,本文以自由空间为例,由表 2令ε=2,则有

|
以系统完成L次定位服务的估计误差均值AEtol为指标,来评价定位算法的性能. AEtol越小,即定位精度越高.显然有

|
式中:C为定位环境中的标签个数,(xil, yil)为第i个标签的实际位置,etoll为第l次定位服务的估计误差.
2.3 无源LANDMARC算法的定位效率评价以系统对C个定位标签完成L次定位服务的系统耗时均值Ttol为指标,来评价无源LANDAMRC系统的定位效率. Ttol越小,定位速度越快,则单位时间内完成定位功能的标签数量越多,即定位效率越高.
显然有
|
其中Ttoll为第l次定位服务的系统耗时,为便于仿真分析,选取C=50.
设定如表 3所示的定位环境,假设各阅读器调至最大功率能级时,环境中的全部标签均能被读取到.下面以第u个阅读器为例,结合定位服务实施过程,分析影响Ttoll的因素.
| 表 3 定位环境参数设置 |

步骤1 阅读器首先工作于最大功率能级,读到的参考标签数目为B0u=B,读到的定位标签数目为C0u=C,未读到的定位标签数目为c0u=C-C0u=0.此时读取全部标签耗时可表示为Tru0=J(B0u, C0u, δ),其中,J为时隙ALOHA防碰撞算法的耗时函数,δ为时隙个数.
典型的时隙ALOHA算法在纯ALOHA算法基础上将时间分成多个离散时隙,标签在响应过程中选择不同的时隙向阅读器发送数据,当单个时隙中仅有一个标签发送数据时,则该标签被阅读器成功识别.各时隙存在碰撞、空闲、成功3种可能状态,分别代表该时隙内有多个标签响应、无标签响应、唯一标签响应.
结合当前阅读器状态,假设系统经历Q次轮询识别B0u+C0u个标签,各轮识别的标签数目分别为Aq,q=1, 2, …Q,显然有
不同于有源RFID系统可以采用标签先发言的单工通信机制,无源UHF RFID通信必须采用基于阅读器先发言的半双工通信机制,阅读器读取全部标签的耗时主要受阅读器请求时间tE和时隙响应时间tD影响[12].则对于耗时函数有

|
需指出,本文选取动态帧时隙DFSA(dynamic frame slotted ALOHA)以进一步降低标签读取过程中的不必要耗时[13]. DFSA算法在时隙ALOHA算法上对时间进一步离散,将多个时隙打包成一个帧,并依据各轮时隙碰撞数目动态调节帧长度.假设初始帧长度为δ1,首轮标签识别过程结束后,分别统计帧中的空闲时隙数目δ1(ξ, 1)、碰撞时隙数目δ1(υ, 1)和成功时隙数目δ1(ψ, 1),依据文献[13]的公式(4)调整得到第二轮的最佳帧长度为δ2=2.39·δ1(υ, 1),依次类推动态更新各轮帧长直至全部标签均被读到,则对于DFSA算法的耗时函数有
步骤2 阅读器降低一个功率能级,读到的参考标签数目为B1u,读到的定位标签数目为C1u,未读到的定位标签数目为c1u=C-C1u,新增未读到的定位标签数目为β1u=c1u-c0u,则认定当前功率能级为该β1u个定位标签为收信场强.假设此时读取标签平均耗时为Tru1=J(B1u, C1u, δ).
步骤3 逐级降低功率能级,假设当降低了hu个能级后,读到的参考标签数目为Bhu,读到的定位标签的数目是Chu=0,未读到的定位标签数目为chu=C,新增未读到的定位标签数目为βhu=chu-ch-1u.此时读取标签平均耗时为Truh=J(Bhu, 0, δ).考虑到不再有定位标签被读到,阅读器停止发射功率信号,切换至休眠模式,结束定位操作,等待上位机系统的下一轮启动指令.
在上述调整功率过程中,第u个阅读器的读取标签耗时可以记为Tru,且有
|
相应地,第u个阅读器的功率能级切换耗时可以记为Tzu,且有
|
步骤4 上位机系统依据各阅读器关于参考标签和定位标签的功率能级信息,依据式(1)~(3)得定位标签的估计位置.
综上,无源RFID定位系统完成一次定位服务的耗时可以描述为

|
式中:Tc为系统对C个定位标签执行LANDMARC算法运算的耗时,Tz为系统中全部阅读器功率能级调整的综合耗时,Tr为系统中全部阅读器读取标签的综合耗时.
对于Tc,显然有
|
以典型多阅读器并行工作和文献[9]中的多天线复用串行工作两种方式为例,分析Ttoll的表达方法.
若系统采用并行方式工作,则有
|
(10) |
从而系统耗时Ttol可以表示为

|
(11) |
若系统采用串行方式工作,则有
|
(12) |
从而系统耗时Ttoll可以表示为

|
(13) |
由式(11)、式(13)可知,在定位标签数目一定的前提下,阅读器的最大功率能级和参考标签布设密度将直接影响系统耗时,采用复用串行方式尽管能够降低系统成本,但却以更大的系统耗时为代价.
2.4 基于联合控制机制的品质函数构建结合文献[14]中的全局优化目标函数的构建方法,本文采用联合控制机制,以估计误差均值最小化、系统耗时均值最小化为目标,构建适于评价无源LANDMARC算法的定位性能品质函数为

|
(14) |
其中k1、k2为权重系数.因此基于无源LANDMARC算法的定位性能评价可以描述为:联合比较多组Gpmax和ρ的配置方式,并从中选取一组从而使得品质函数达到最小.
需指出,权重系数的选取至关重要,并决定估计误差和系统耗时在定位性能品质函数中的比重.本文分别引入CWA(conventional weight aggregation典型权重聚焦)算法和DWA(dynamic weight aggregation动态权重聚焦)算法实现权重系数的优化选取.
2.5 基于CWA/DWA算法的权重系数选取CWA算法的核心思想是依据寻优先验信息,建立权重系数与先验信息的关系等式,从而选取合适的权重系数[15].首先选取CWA算法,结合定位需求先验信息,引入可接受估计误差均值的极限值AEtollim、可接受系统耗时均值的极限值Ttollim,令k1、k2满足

|
(15) |
假设AEtollim=0.45 m,Ttollim=45 s,若k1=1,则k2=0.01.
然后选取DWA算法对式(15)中的权重系数的关系进行性能评价. DWA算法的核心思想是通过优化过程中目标函数的权重系数的周期性变化以得出帕雷托边界曲线.需指出,帕雷托边界曲线是DWA算法中判断权重系数是否为最优值的重要标准.帕雷托边界是指在某种既定的资源配置状态下,任何改变都不可能使当前的状况变好或变坏.满足帕雷托最优状态标准的资源配置可以被认为是最优配置方法.
依据DWA算法寻优机理,令权重系数按式(16)、(17)周期变化,以获得基于帕雷托边界的多种权重系数配置方式[16]:

|
(16) |

|
(17) |
其中F表示权重系数变化的频率,f表示权重系数的寻优尺度.令F=200,f=0, 1, 2, …, 200,则可得到如图 1所示的f/F和k1(f)/k2(f)的关系.结合图 1中呈现的周期性和对称性,为提高仿真运行效率,在本文仿真分析中限定f的最大值为F/4.

|
图 1 DWA算法中f/F和k1(f)/k2(f)的关系 |
若依据式(15)得出的k1、k2在帕雷托边界曲线上,且基于当前k1、k2得到的最小M满足AEtol≤AEtollim和Ttol≤Ttollim,则可认定CWA算法选取的k1、k2有效.否则,在帕雷托边界曲线上重新选取同时满足AEtol≤AEtollim和Ttol≤Ttollim的一组k1、k2进而得到定位性能品质函数的具体表达形式.
最后,将多组Gpmax和ρ的配置方式带入到式(14)中,则品质函数取值最小的一组Gpmax和ρ具有最佳的定位性能.
3 仿真分析为分析所提方法在多种噪声环境中的适应能力,令σ分别取值0.3、1.1、1.5、1.8、2、4、6.在室内环境中部署4个工作频率为915 MHz的阅读器,Gpmax分别取值8、16、32、64、128,对应的Ip分别取值4、2、1、0.5dB.参考标签以ρ×ρ方式均匀布设,ρ∈[4, 5, …, 15],标签和阅读器采用ISO18000-6C协议通信,依据动态帧时隙ALOHA算法实现标签防碰撞读取,令tE=52 ms,tD=4.9 ms,tz=50 ms,tc=10 ms,F=200,f=1, 1.25, …, 49.75, 50,随机放置50个定位标签并进行300次蒙特卡罗实验验证上述定位性能评价方法,相关仿真参数见表 4.
| 表 4 仿真参数设置 |

结合表 3中参数,首先选取CWA算法确定权重系数.对于并行工作方式和串行工作方式,分别有k1/k2=40/0.7=57.14和k1/k2=80/0.8=100. 图 2反映了在多种噪声环境下两种工作方式的权重系数配置方式及帕雷托边界.观察可见,在噪声较小的环境中,即0.3≤σ≤2,对于两种工作方式,由CWA算法推荐的权重配置均有AEtol < AEtollim和Ttol < Ttollim,且推荐的权重配置处于DWA算法的帕雷托边界上,因此CWA算法选取的k1、k2有效.而当σ≥4时,人为扰动及障碍物阻隔对电波传播的影响已经较为明显,定位精度严重下降,帕雷托边界上任意一点均难以同时满足AEtol<AEtollim和Ttol<Ttollim,因此应重新设置系统的AEtollim、Ttollim,结合式(15)更新CWA算法的推荐权重配置.

|
图 2 权重系数配置及帕雷托边界 |
依据图 2结论,选取0.3≤σ≤2的室内环境进行分析,得到两种工作方式的品质函数表达式为

|
(18) |

|
(19) |
表 5反映了基于式(18)、式(19)得到的多噪声环境下的最优资源配置方式及系统性能.分析可知,对于并行工作方式,随着环境噪声的逐渐增大,最优参考标签排列方式由8×8提高为9×9以缓解收信功率失真对定位精度的影响,并在σ∈[0.3, 2]区间内稳定在10×10均匀排列.尽管在上述渐变过程中,参考标签数量由64增大至100会增加系统耗时,但最优Gmax始终稳定在16,将Ttol始终控制在[18.15, 20.61]范围内,并满足40 s的上限要求.对于串行工作方式,随着环境噪声逐渐增大,最优Gmax仍稳定在16,而最优参考标签排列方式由8×8降低为7×7,上述变化趋势与并行工作方式显然相同.对比式(10)和式(12)可知,串行工作方式中的阅读器采用时分复用方式调用系统射频通信资源,叠加效应使得系统耗时随参考标签布设密度的提升而急剧加大.以σ=1.5为例,当ρ=10、Gmax=16时,并行工作方式下达到最优性能且Ttol=19.25 s,若串行工作方式也采用上述资源配置方式,其系统耗时将逼近80s的上限要求,而若采用参考标签7×7方式排列,其系统耗时将控制在55 s,远低于80 s的上限要求.
| 表 5 多噪声环境下的最优资源配置方式及系统性能 |
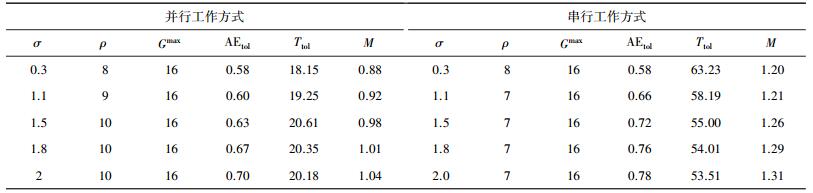
图 3反映了多种噪声环境下两种工作模式下的估计误差和系统耗时均值的累计分布函数CDF(cumulative distribution function)曲线性能.在多种噪声环境下,两种工作模式的CDF曲线平滑,反映出本文建立的定位精度评价模型和定位效率评价模型具有良好的稳定性和适应性.以σ=1.1为例,对于并行工作方式,估计误差的最小值为0.382 6 m,以92.33%的概率低于0.7 m,系统耗时的最小值为15.9340 s,以100%的概率低于40 s;对于串行工作方式,估计误差的最小值为0.4316 m,以94%的概率低于0.8 m,系统耗时的最小值为45.12 s,以100%的概率低于80 s.

|
图 3 两种工作模式下的估计误差和系统耗时的累计分布函数 |
同时,由图 3(a)可知,对于并行工作方式,在相同资源配置条件下如ρ=10、Gmax=16,当σ由1.5增大到2时,估计误差的累计分布曲线向右平移.且由图 3(c)可得到关于串行工作方式的相似结论.由图 3(b)可知,对于并行工作方式,在相同资源配置条件下如ρ=10、Gmax=16,随着σ由1.5增大到2,系统耗时的累计分布曲线缓慢左移.其原因是:基于本文仿真设置中的关于阅读器和标签增益等相关参数,在发射功率为4 W时,阅读器的理想辐射半径可达15.049 4 m,远大于仿真环境中阅读器到监测区域边界的最大距离d=
综上,并行工作模式以提高系统成本的方式降低系统耗时,而串行工作模式以时分复用方式提高资源的利用率,降低系统成本要求,但系统耗时急剧增加,且在环境噪声较大的环境中,系统不得不降低参考标签布设密度以牺牲定位精度来换取系统耗时,从而保证全局定位性能的最优,显然这一结论与实际应用情况吻合.
4 结语针对现有基于无源LANDMARC算法的改进研究主要采用定位误差评价系统性能,而没有考虑无源半双工机制引起的系统效率较低的问题,本文结合路径损耗模型,通过分析阅读器最大功率能级、参考标签布设密度对定位精度及定位实时性的影响,构建系统耗时模型,并以估计误差均值的最小化、系统耗时均值的最小化为目标,引入基于联合控制机制构建的品质函数,同时采用CWA算法和DWA算法选取权重系数,提出了一种适用于无源LANDMARC算法的定位性能评价方法.多种噪声环境中的仿真结果表明,所提评价方法对于无源RFID定位系统的参数选择及性能评定,具有一定的指导意义.
| [1] |
ZHOU J, SHI J. RFID localization algorithms and applications-a review[J]. Journal of International Manufacturing, 2008, 20(6): 695-707. |
| [2] |
SANPECHUDA T, KOVAVISARUCH L. A review of RFID localization: applications and techniques[C]//Proceeding of the 5th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology. Krabi: IEEE, 2008: 769-772.
|
| [3] |
NI L M, LIU Y, LAU Y C, et al. LANDMARC:indoor location sensing using active RFID[J]. Wireless Networks, 2004, 10(6): 701-710. DOI:10.1023/B:WINE.0000044029.06344.dd |
| [4] |
ZHAO Yiyang, LIU Yunhao. VIRE: Active RFID-based localization using virtual reference elimination[C]//Proceeding of International Conference on Parallel Processing. Xi'an: IEEE, 2007: 56.
|
| [5] |
史伟光, 刘开华, 于洁潇, 等. 基于加权欧式算子的射频识别定位算法[J]. 计算机工程, 2011, 37(9): 22-24, 28. |
| [6] |
HAN K, CHO S H. Advanced LANDMARC with adaptive k-nearest algorithm for RFID location system[C]//Proceeding of the 2nd IEEE International Conference on Network Infrastructure and Digital Content. Beijing: IEEE, 2010: 595-598.
|
| [7] |
CHOI J S, LEE H, ELMASRI R, et al. Localization systems using passive UHF RFID[C]//Proceeding of 5th International Joint Conference on INC, IMS, and IDC. Seoul: IEEE, 2009: 1727-1732.
|
| [8] |
KHAN M A, ANTIWAL V K. Location estimation technique using extended 3-D LANDMARC algorithm for passive RFID tag[C]//Proceeding of International Advance Computing Conference. Patiala: IEEE, 2009: 249-253.
|
| [9] |
王远哲, 毛陆虹, 刘辉, 等. 基于参考标签的射频识别算法研究与应用[J]. 通信学报, 2010, 31(2): 86-92. |
| [10] |
任智, 李晴阳, 陈前斌. 无线网络衰落和损耗的建模与仿真研究[J]. 系统工程与电子技术, 2009, 31(12): 2813-2819. DOI:10.3321/j.issn:1001-506X.2009.12.005 |
| [11] |
佐磊, 何怡刚, 李兵, 等. 无源超高频射频识别系统路径损耗研究[J]. 物理学报, 2013, 62(14): 150-157. |
| [12] |
CHEN W. A feasible and easy-to-implement anticollision algorithm for the EPCglobal UHF class-1 generation-2 RFID protocol[J]. IEEE Transactions on Automation Science and Engineering, 2014, 11(2): 485-491. DOI:10.1109/TASE.2013.2257756 |
| [13] |
SCHOUTEF C. Dynamic frame length ALOHA[J]. IEEE Transactions on Communications, 1983, 31(4): 565-568. DOI:10.1109/TCOM.1983.1095854 |
| [14] |
MANMUEL L, JAVIER O R, ANTONIO R J, et al. Diversified local research for the optimal layout of beacons in an indoor positioning system[J]. ⅡE Transactions, 2009, 41(3): 247-259. |
| [15] |
FLEMING P J. Computer aided control systems using a multi objective optimization approach[C]//Proceeding of IEEE Control' 85 Conference. Cambridge: IEEE, 1985: 174-179.
|
| [16] |
JIN Y, OLHOFER M, SENDHO B. Dynamic weighted aggregation for evolutionary multi-objective optimization: why does It work and how?[C]//Proceeding of the Genetic and Evolutionary Computation Conference. San Francisco: ACM, 2001: 1042-1049.
|