 2019, Vol. 51
2019, Vol. 51



微创外科手术在患者体表切开3~4个5~10 mm的创口,以便将内窥镜伸入患者体内,在视觉图像的引导下操作手术器械完成手术[1].相比于传统的开放式手术,微创外科手术具有创口小、痛苦少、恢复快以及感染率低的优点[2].微创手术也存在医生手眼不协调[3]、易疲劳、手部抖动影响手术质量、手术器械不灵活等缺点.随着机器人技术的发展,将机器人技术应用到微创外科手术中可以很好地解决微创手术中存在的这些不足.在机器人辅助微创外科手术中,医生坐在主控台前操作主手控制从操作手操作,医生不易产生疲劳;采用三维立体的高清图像,可以按照需要放大术野区域,视野信息比人眼更加清晰;手术器械具有四个自由度,更加灵活;而且,能够有效滤除医生的手部抖动,操作性更好.
1 微创外科手术机器人系统微创外科手术机器人系统作为机器人技术与微创外科手术技术结合的成功典范,改善了医生进行微创外科手术的环境和工具,提高了外科手术的质量.目前,微创外科手术机器人的研究越来越受到重视,美国、欧盟、以色列、日本、韩国等发达国家纷纷将其作为未来高技术研究和战略性新兴产业之一.微创手术机器人系统发展里程如图 1所示.

|
图 1 微创手术机器人系统发展历程 Figure 1 Development history of minimally invasive surgical robot system |
英国皇家理工学院在1980年研制的Probot[4]机器人用于泌尿微创手术,是真正意义上的第一台用于微创手术的手术机器人.美国Computer Motion公司研制的AESOP内窥镜操作机器人[5-6]在1994年就得到美国FDA的许可,应用于微创外科手术.在AESOP系统的基础上,Computer Motion公司开发了ZEUS[7-8]机器人系统,该系统于1996年获得了美国FDA许可,应用于临床手术. 1995年,IBM与霍普金斯大学联合研制了一款可以安装在天花板上的内窥镜操作机器人HISAR[9]系统.美国直觉机器人公司于1999年研制了da Vinci[10-12]医疗机器人系统,该系统由外科医生控制台、机械臂系统、成像系统构成,其定位精度最差为2.78 mm.美国直觉机器人公司在2014年研制出最新型微创外科手术机器人da Vinci Xi[13-14],4个从操作手臂固定在旋转支架上,能够旋转到患者体表的任何部位,内窥镜能够附在任何器械臂上. da Vinci Xi机器人具有更小、更薄的从操作手臂,能够减少机械臂之间的碰撞,具有更广的运动范围.由华盛顿大学和加州大学联合研制Raven[15-17]系统是由两个持械臂和一个持镜臂组成,采用钢丝传动,结构紧凑、体积较小.埃因霍温科技大学研制了具有四自由度力反馈的Sophie[18-19]机器人系统,该系统的从操作手臂统一固定在病床上,具有结构紧凑,质量轻的优点. 2012年德国宇航中心研制的DLR MIRO[20-22]轻型微创机器人系统具有两个持械臂和1个持镜臂,能够提供力觉信息的反馈和三维立体高清图像,器械最大夹持力为40 N,精度为0.04 N.加拿大Titan Medical公司研制的SPORT单孔手术机器人具有3D高清晰视觉系统和柔性手术器械.该系统的手术器械和腹腔镜从单孔进入患者体内,通过1个切口开展微创外科手术.美国直觉机器人公司研制的da Vinci sp单孔手术机器人系统在2014年4月获得了美国FDA许可.手术执行机构由1个3D高清摄像头和3个手术器械组成,是目前唯一商用化的单孔手术机器人系统. TransEnterix公司研制的Senhance[23]机器人系统包括1个主控台、3个分体式从操作手臂及成像系统.手术器械可通过磁性吸附在机械臂上,能实现手术器械的快速更换.该系统具有力反馈和人眼跟踪功能,该力反馈的灵敏度可达0.35 N. Meere公司与Severance医院开发的手术机器人“Revo-Ⅰ”[24-26]包括主控台、4条从操作手臂和成像系统,与da Vinci Si系统相比,该系统结构更加紧凑,在手术性能上基本持平,并于2017年8月获得MFDS批准上市.
国内研究机构也开展了微创外科手术机器人技术研究.上海交通大学研制的“神刀华佗”[27]微创手术机器人采用双平行四边形机构,占用空间较小,刚度较高, 从主操作臂到从操作臂的响应时间延迟为23.6 ms.天津大学“妙手”机器人系统于2005年完成主从操作的显微外科手术动物实验,2010年7月通过国内专家鉴定;2014年研制的“妙手-S”系统[28]的特点是手术器械末端主从同构,其轨迹跟踪精度<3 mm,最大误差<3 mm.哈尔滨工业大学研制的“华鹊-Ⅱ”型[29]微创手术机器人从操作手臂采用分体式设计,移动和摆位灵活,不易干涉.
2 从操作手臂研究在机器人辅助微创手术中,需要考虑机器人与医护人员、患者、医疗设备之间的相对位置.因此,微创外科手术中从操作手臂构型设计和结构设计应满足实际临床使用需求.
2.1 从操作手臂构型设计微创外科手术从操作手臂构型主要分为分体式、一体式.分体式从操作手臂基座位置相互独立,一体式从操作手臂都固连在一个基座上.
微创外科手术分体式从操作手臂术前摆位灵活,易于选择器械合适的插入位置和角度.其缺点是会占用手术室较大的空间,且难于确定从操作手臂间的相对位置关系. ZEUS[7-8][15-17]微创手术机器人从操作手臂均采用分体式构型,分别安装在手术床的两侧.哈尔滨工业大学研制的“华鹊-Ⅱ”型微创手术机器人、TransEnterix公司研制出的Senhance[23]机器人从操作手臂也采用分体式构型,每条机械臂具有移动基座,可以在手术室随意移动.
微创外科手术一体式从操作手臂结构紧凑,占用空间小,机械臂间相对位置确定.其缺点是机械臂间容易发生干涉,增加术前摆位的难度. Sophie[18-19]微创手术机器人、da Vinci[10-12]医疗机器人、“Revo-Ⅰ”[24-26]微创手术机器人、“妙手-S”[28]微创手术机器人均采用一体式从操作手臂构型.
2.2 远心运动实现方法在微创外科手术过程中,手术器械在患者体表切口限制下做定点运动(即远心运动)时只具有四个自由度:两个绕体表切口旋转自由度,一个沿器械轴线的平移自由度和一个绕器械轴线的旋转自由度.微创手术中实现约束远心点的形式有被动式关节、主动控制和机械约束式远心机构.
2.2.1 被动关节式远心机构微创外科手术系统被动关节式远心机构一般由二自由度垂直相交的旋转关节构成,通过机械臂主动关节运动,在患者体表切口限制下,实现手术器械的远心运动.被动关节式远心机构易受到人体切口处柔性影响,很难确定器械插入点的精确位置,影响手术器械操作精度. ZEUS[7-8]微创手术机器人具有四个主动关节和两个被动关节,其中被动关节轴线垂直相交,配置在机械臂末端,实现手术器械绕远心点运动.天津大学研制的“妙手-S”[28]微创手术机器人的从操作手臂通过三个主动关节带动两个被动关节,在切口处实现手术器械的远心运动.
2.2.2 主动控制式远心运动微创外科手术系统主动控制方式是通过控制算法实现机械臂绕切口的远心运动.该方式结构简单,但远心运动精度依赖于控制系统精度和稳定性,一旦控制系统出现差错,难以保证系统安全性.德国宇航中心DLR MIRO[20-22]轻型微创机器人通过构建冗余运动的零空间和借助位置、力控制来实现绕空间内任意点做远心运动. TransEnterix公司的Senhance[23]微创手术机器人也是构建冗余运动,通过合理的控制算法来实现绕切口点的远心运动.
2.2.3 机械约束式远心机构微创外科手术系统机械约束式远心机构能在保证关节任意运动的同时还能约束远心点的位置,具有成本低、安全性高的优点.微创外科手术系统机械约束式远心机构分为平行四边形机构、球形机构、弧形机构和并联远心机构.
平行四边形约束机构原理如图 2(a)所示.该机构可以分为双平行四边形机构和开环平行四边形机构.双平行四边形机构的优点在于其刚度高,末端的定位精度高,缺点是关节数和连杆数量较多,占用的空间体积较大,并且有冗余约束,对加工精度要求较高.哈尔滨工业大学“华鹊-Ⅰ”型[30]、上海交通大学“神刀华佗”[27]从操作手臂均采用双平行四边形机构.开环平行四边形机构的优点是关节数和连杆数较少,缺点是采用多段钢带,机构刚度低,需要专用设备组装,且增加后续组装和维修成本.应用该远心机构的典型代表有da Vinci System[10-12]系列、“Revo-Ⅰ”[24-26]微创手术机器人以及哈尔滨工业大学微创手术机器人[31].

|
图 2 机械约束远心机构 Figure 2 Remote center mechanism with mechanical constraints |
球形约束机构原理图如图 2(b)所示,该机构有并联型和串联型两种实现方式.由于并联型球形机构碰撞及相互干渉的概率较高,故并未被广泛采用; 串联型球形机构的优点是关节数和连杆数较少,结构紧凑. RAVEN[15-17]微创手术机器人、哈尔工业大学研制的“华鹊-Ⅱ”型微创手术机器人[29]均采用球形机构.
弧形约束机构原理图如图 2(c)所示,该机构仅有两个关节,结构简单,缺点是体积大,驱动设计比较困难. Probot[4]微创手术机器人通过弧形轨道作为远心机构来实现手术操作.
并联约束远心机构通过并联机构来实现远心运动,具有刚度强,结构紧凑的优点,但也存在运动强耦合、加工精度要求高以及工作空间小的缺点,使得机器人系统的正逆运动学求解困难. PRAMiSS微创手术机器人[32]由两个并联机构构成,实现绕远心点运动.
3 控制系统结构与控制方法微创外科手术机器人的控制系统在设计过程中应该考虑系统的复杂度、精确性和安全性,使得微创手术机器人系统具有精度高、灵活性好、操作直观性好、安全性高等优势.微创手术机器人控制系统研发主要集中在控制系统结构设计、术前反向驱动控制、视觉临场感主从控制和术中从操作手臂控制方法这几个方面.
3.1 控制系统结构设计合理的控制系统结构有助于降低微创手术机器人系统设计的复杂度,缩短机器人干预手术时间,提高系统的实时性和安全性.分析文献可知,用于微创外科手术机器人的控制系统结构主要如表 1所示.
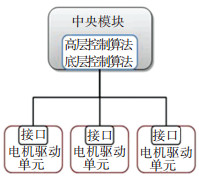
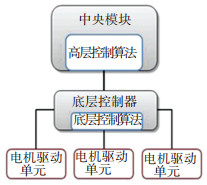
| 表 1 微创外科手术机器人控制系统结构类型 Table 1 Control system structure types of minimally invasive surgical robot |
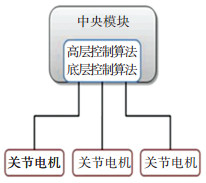
集中式处理与连接:高层控制和底层控制都集中在中央模块中,使得所有关节电机的线缆都要与该中央模块并行相连,从而实现集中控制.华盛顿大学开发的RAVEN-Ⅱ遥操作手术系统[15-17, 33]就采用了此控制方式.该系统的中央模块是基于实时Linux操作系统,集成了机器人操作系统中间设备Robotic Operating System Middleware(ROSm)、USB接口模块、电机控制模块等,各个关节电机均连接到该中央模块.此外,关节电机与主控台利用交互式遥操作协议进行通讯.天津大学开发的显微外科手术机器人“妙手-A”[34-35]主手操作臂和从操作手臂的关节电机驱动单元需要分别并行地连接到三套可编程多轴运动控制卡(PMAC)上,进而实现对各个关节的控制.
集中式处理与分布式连接:高层控制和底层控制集中在中央模块中,同时利用高速实时的串行通讯技术实现分布式连接.德国宇航中心的手术机器人MIRO[36-39],其电机驱动模块利用现场可编程门阵列(FPGA)技术实现与各种传感器的对接以及对电机的控制,同时,这些驱动模块通过SpaceWire协议与一台主计算机实现分布式连接,该计算机运行QNX实时操作系统,并利用MATLAB/Simulink实现高层和底层控制.波兰“Robin Heart”系列手术机器人系统[40-41]的中央模块实现高层和底层控制算法,并与关节驱动单元通过VME或CAN总线进行信息交换.意大利圣安娜高等学校的单孔内窥镜手术机器人SPRINT[42-44]的中央模块通过CAN总线技术与从手臂关节驱动单元进行通讯,其控制系统采用Linux的实时扩展版本RTAI(real time application interface),利用MATLAB/Simulink进行控制软件的开发.上海交通大学研制的“神刀华佗”手术机器人[45-46]结合了Robotics Technology Componet(RTC)、ROS等技术,搭建了一套模块化的分布式控制系统,该系统采用Linux嵌入式操作系统,从操作手臂的中央模块负责完成机器人的高层控制与底层控制,并通过CAN总线与电机驱动单元通讯.
分布式处理与连接:该结构也是基于分布式连接,但是高层控制算法与底层控制算法是分开实现的.哈尔滨工业大学研制的“华鹊-Ⅱ”微创手术机器人[47-48]采用了这种控制结构.其高层控制算法在中央模块中完成,底层控制算法则是在三个多轴网络控制器中实现,中央模块与网络控制器通过Modbus/TCP协议进行数据交换.同时,采用EtherCAT分布式总线实现对各个关节电机的驱动.
从国内外的研究成果可以看出,大多数微创外科手术机器人控制系统均采用分布式的控制结构,这样可以减少控制系统布线和设计复杂度,使机器人整体体积更小,灵活度更高;另外,各种嵌入式实时操作系统、高速通讯方式等技术的应用,都有助于提高手术机器人系统的精度和安全性.
3.2 术前从操作手臂的反向驱动控制机器人辅助微创手术操作过程主要分为术前设置和主从操作两个阶段.在术前设置阶段中,医生手动调整各机械臂的臂形,使机械臂与患者体表的套管进行连接,将器械以较为理想的姿态插入患者体内并调整好器械的位姿,使其指向病灶位置.然后,医生启动主从控制系统,实现对微创手术机器人的主从控制,并完成相关的手术操作.
微创手术机器人反向驱动性是指传动系统将手术器械运动传递到从操作手臂电机输出端的容易程度[49].在术前设置过程中,由于机械臂重力、摩擦力和惯性力等的阻碍,延长了微创手术的术前设置时间,也增加了手术操作的风险性.微创手术机器人术前的反向驱动调节方式主要有机构装置调节[50]、基于力传感器的力闭环控制调节[22, 51]以及阻力矩补偿调节[52-53].机构装置调节是通过电磁制动器、离合器或其他机械结构断开末端执行器和相应电机之间的连接来实现反向驱动调节.其优点是不需要额外的控制算法,但外科医生需要承受机械臂本身的重力和惯性力,增加医生手动调节负担.基于力传感器的力闭环控制调节是一种非常安全、高效、精确的术前手动调节方法,但力传感器需要额外的经济成本和安装空间.阻力矩补偿调节是利用电机力矩来平衡关节的等效阻力矩,其优点是不需要额外的传感器和传动部件,减少机械传动环节,从而提高了运动精度,但它需要辨识机械臂动力学参数,且在关节启动或低速运动时,对摩擦力和惯性力的补偿不够精确.
3.3 视觉临场感主从控制在主从式微创手术机器人操作过程中,医生坐在主控台一侧,通过内窥镜成像系统观察3D显示器中的图像,操作主手设备来控制从操作手臂运动,此时图像中的从操作手臂上的手术器械能够完全复现医生的手部动作,这一过程称为视觉临场感主从控制.对于微创手术机器人视觉临场感主从技术的研究,主要从以下几个方面进行:
1) 主手和从操作手臂构型的选择.对于主从式微创手术机器人系统,按照其构型的相似程度,可分为主从同构系统和主从异构系统.主从同构是指主手和从操作手臂具有完全相同的构型、运动学模型以及动力学模型,只在尺寸上有所区别.主从同构优点在于主从运动直观性强,控制较为简单,主从映射易实现且计算量小,缺点是主手需要参照从操作手臂进行设计,通用性较差.主从异构即主手和从手机械结构相异,使得各自的运动关系存在较大差异.这种情况下,可以根据不同的需求对主手和从手分别进行设计,增加了主手的通用性.但是,主从异构式设计的控制方法较为复杂.
2) 主从控制变量选择.微创手术机器人通常用到的主从控制变量包括绝对式位姿变量和增量式位姿变量.前者是实现从操作手臂对主操作手绝对位姿的跟踪,后者则是将主手的位姿运动增量映射为从手的位姿增量来实现控制.
3) 主从运动映射关系选择.主从式微创手术机器人操作过程中,为了使医生根据3D图像能够直观地控制手术器械的运动,实现“所动即所想”,需要为主从控制变量设计合适的运动映射关系.通常,微创手术机器人系统都是先建立主手末端坐标系、主手基坐标系、显示器图像坐标系、显示器物理坐标系、手术器械末端坐标系、内窥镜镜头末端坐标系,再进行坐标系映射变换,使得主手末端在显示器图像坐标系中的位移方向和姿态与手术器械末端在内窥镜末端坐标系中的位移方向和姿态保持一致.这样就可以让医生感觉到显示器中手术器械图像的运动方向和姿态与他手部的运动方向和姿态相一致,实现医生的手眼协调,达到视觉临场的控制效果.
4) 主从控制空间选择.主从式微创手术机器人通常在关节空间或笛卡尔空间内进行主从控制.在关节空间进行控制时,主手各关节的运动信息分别按照映射关系传递给从手对应的各关节,主要适用于主从同构系统;而在笛卡尔空间进行控制时,则需要在笛卡尔空间中设计适当的主从运动映射关系,再将主手的运动信息按照映射关系传递给从手,进而根据从手正、逆运动学求解出从手各个关节的运动信息,该种控制方法主要适用于主从异构系统. 表 2列出了一些国内外微创外科手术机器人采用的主从控制方法.
| 表 2 微创外科手术机器人主从控制方法 Table 2 Master-slave control method of minimally invasive surgical robot |
由表 2可以看出,绝大多数微创外科手术机器人采用了主从异构的设计方式,这样有利于设计出更加符合手术要求的从操作手臂和满足医生操作需求的主手.同时,通过将主手在显示器图像坐标系下的位移和姿态映射为手术器械在内窥镜末端坐标系下的位移和姿态,实现医生的手眼协调.此外,主从控制变量和空间主要使用位置增量式、笛卡尔空间.为了提高系统的可操作性,微创手术机器人系统[21, 34, 41, 46, 54-55]还设计了一些辅助控制功能,例如:当主操作手运动到极限位置或不合适的位置时,在保持从操作手臂位置不变的情况下,可以对主手的位置进行重新调整;设置不同的主从缩放比例,能使医生完成不同精度需求的手术.视觉临场感主从控制及辅助控制功能的设计,使医生对手术机器人系统的控制清晰直观,减少了医生的疲劳感.
3.4 术中从操作手臂控制微创手术机器人系统从操作手臂的主动关节一般包括减速器驱动、钢丝/带传动以及力传感器等柔性元件,因为运动过程中存在弹性振动以及运动结束后的残余振动使这些关节难以被精确控制,从而影响缝合和打结等精细的手术操作.为实现从操作手臂的位置跟踪和振动抑制,需要对从手机械臂进行运动控制和交互控制.
从操作手臂的运动控制主要是位置控制.位置控制将操作空间的运动变换到关节空间,然后在关节空间进行控制律的设计.该控制方法采用基于逆动力学模型的PID控制,实现简单,鲁棒性好,但对机械臂动力学参数敏感,不适用于变载荷及高速运动控制.为此,研究者基于Spong[56]和Ge[57]柔性关节模型,针对柔性机械臂,开发了大量先进的控制算法,这些算法的优缺点已在参考文献[58]详细列出.
从操作手臂的运动控制方法大体上可分为基于无模型的方法和基于模型的方法.基于无模型的方法主要包括输入整形、最优轨迹规划法、PID控制、模糊控制以及神经网络控制等.输入整形[59]和最优轨迹规划法[60]为前馈控制器,控制的目的是抑制运动结束后的残余振动.这类算法不需要反馈传感器,但是控制输入通常没有考虑系统的变化.因此,该类算法常需要结合PID等闭环算法来实现振动抑制和精确位置控制.文献[61-62]采用基于模糊逻辑的PID算法对主从式腹腔镜手术机器人进行位置控制.文献[63]采用基于H∞的PID算法对三自由度腹腔镜手术机器人进行位置控制.基于模型的方法主要有奇异摄动法[64]、反馈线性化[65]、积分反步法[66]、滑模控制[67]、最优控制[68]、自适应控制[69]、预测控制[70-71]等技术,这类方法同样能够提高机械臂的运动精度和减少弹性振动,但在反馈回路中引入了延迟.其中,奇异摄动技术利用积分流形对系统进行降阶,分别对低阶的快时标和慢时标子系统设计独立的控制器,以实现整个系统的位置控制和振动抑制.反馈线性化方法是柔性关节控制的一种可行的方法,但该方法的跟踪性能严重依赖于系统模型的准确性.基于预测模型、滚动优化和反馈校正的模型预测控制能够以直观和有效的方式处理约束和延迟.然而, 大多数模型预测控制需要昂贵的硬件设备,不适合快过程系统.为了适合机器人控制等快过程系统的应用,模型预测控制发展为预测函数控制[72-74],把控制输入结构看作若干简单基函数的线性组合,从而降低了算法的计算量.文献[75-76]利用卡尔曼滤波和预测控制对手术器械的运动进行补偿,使其与心脏跳动同步.
微创手术机器人从操作手臂的交互控制是通过力传感器和位置传感器来实现力和位置的同时控制,其控制方法可分为力/位置混合控制[77]和阻抗控制[78].从操作手臂力/位置混合控制是指在正交的操作空间中分别进行位置控制和力控制,两者相互独立.文献[79-82]实现了手术机器人力/位置混合控制.从操作手臂的阻抗控制是指通过调节机械臂的惯性、阻尼和刚度参数来实现从操作手臂末端的位置控制和力控制.文献[21, 83]实现了手术机器人的阻抗控制.
4 用于微创手术的力反馈主手研究 4.1 力反馈主手的机构设计力反馈主手作为微创外科手术机器人的输入设备,操作者通过主手控制从操作手臂完成手术操作,同时能够反馈手术器械与组织的作用力.力反馈主手的结构形式可以分成串联、并联和混联3类.串联型主手具有工作空间大、运动灵活、控制简单等优点,缺点是刚度较低;并联型主手具有惯量低、刚度高、承载力大、运动精度好的优点,其缺点是工作空间小、灵活度较低;混联型主手有较高的操作精度和灵活性,其位置调整机构一般采用并联型式,姿态调整机构采用串联型式.
da Vinci手术机器人系统采用八自由度的串联型主手[84],如图 3(a)所示.该主手包括三自由度的定位机构,四自由度的冗余手腕以及一个夹持机构.其特点是工作空间大,手腕灵活度高,能够提供六维的力/力矩反馈,但是由于夹持机构没有电机,所以不能提供夹持力反馈.哈尔滨工业大学研制了一款八自由度串联型主手,如图 3(b)所示,能够实现六维力/力矩反馈及夹持力反馈[85].天津大学研制了一款七自由度串联型力反馈主手,如图 3(c)所示,其关节轴线竖直布置,减少了需要平衡重力的关节,同时能够提供三维的力反馈功能[86].西安大略大学研制了七自由度并联型力反馈主手[87],如图 3(d)所示.该主手的所有伺服电机配置在基座上,采用钢丝传动,以减小整个主手的惯量,各杆件采用中空的碳纤维管,增强了操作者的力觉感知. Force Dimension公司的Sigma.7力反馈主手采用混联型机构[39],如图 3(e)所示.该主手位置调整机构采用Delta并联机构,姿态调整机构采用三个轴线相互垂直的串联型关节,末端安装一个夹持机构,可实现位置与姿态运动完全解耦.

|
图 3 典型力反馈主手 Figure 3 Typical haptic master hands |
CEA LIST研制了一款七自由度的高精度混联型力反馈主手[88],如图 3(f)所示.该主手由两个五自由度的机械臂并联形成一个活动平台,平台串联一个带有夹持自由度的转动关节,这种结构获得了与串联型主手相当的工作空间和灵活性.
4.2 力反馈主手重力补偿为降低微创外科手术中医生操作的疲劳程度,获得精确的力觉感知,需要补偿主手自身的重力.重力补偿有两种方式:一种是被动式重力补偿,通过添加配重块或弹簧的方式来实现机构的重力平衡,其缺点是增加了机构的质量和惯量以及机构设计的复杂程度;另一种是主动式重力补偿,通过控制系统驱动电机来补偿重力矩,其缺点是依赖于动力学模型的精确性以及占用电机的部分输出力矩.主手的重力补偿通常采用被动补偿与主动补偿相结合的方式,首先通过机构设计补偿绝大部分重力,然后再利用主动式补偿方法将剩余重力完全补偿.
Phantom Premium系列以及1.5/6F系列的力反馈主手以电机质量来平衡姿态调整机构的大部分重力,然后采用主动式方法进行剩余重力的补偿[89]. Sigma.7力反馈主手和VirSense主手[90]将位置调整机构的驱动电机配置在主手的基座上,最大程度地减小了主手运动关节的重力.在此基础上,利用弹簧和主动式补偿方法来实现主手的重力平衡.
4.3 力反馈控制策略力反馈控制有两种最基本的策略[91]:第一种为阻抗控制策略,该方式通过调节主手运动来控制作用于主手上的作用力.应用阻抗控制策略的力反馈主手主要有HaptionVirtuose[92]、Pantograph[93],Phantom,SPIDDAR-G[94]力反馈设备;第二种为导纳控制策略,通过调节作用于主手上的力来控制主手的运动.应用导纳控制的力反馈主手主要有FCS HapticMater[95],VISHARD10[96]等.
在阻抗控制和导纳控制基础上,结合自适应控制、最优控制和鲁棒控制等算法,能够提高主手力反馈的性能[97]. Heon等[98]将一种新的自适应阻抗控制算法应用到研制的六自由度力反馈主操作手中,能实时估计变化的接触阻抗. Ozgur等[99]提出了基于电机力矩反馈补偿器的闭环阻抗控制算法,提高了力反馈主手力反馈的透明性.
5 手术器械及力感知研究在机器人辅助微创外科手术中,手术器械作为末端执行器直接对患者进行操作.机器人辅助微创手术器械具有灵活度高,安装便捷,方便做无菌化处理等特点,可分为多关节手术器械和连续体机构手术器械.
5.1 多关节手术器械da Vinci手术机器人系统的Endowrist系列微器械[10]包含了外科手术中常用的手术钳和手术剪刀等工具(如图 4(a)所示),可以根据不同手术要求选择器械,器械轴直径为5~10 mm,采用钢丝传动,配有张紧装置,限制使用次数. Zeus手术机器人系统配套的手术器械系列[100]包括二自由度和三自由度两种,如图 4(b)所示,器械轴直径仅为3~5 mm,包括了外科手术的常用工具.密歇根州立大学提出利用齿轮链传动方式进行微器械的设计(AMMIS)[101]方法, 如图 4(c)所示, 该方法使微器械可弯折±180°,实现较大运动空间,灵活度较高.日本九州大学、东京大学和山梨大学联合研制出一种新型二自由度微器械[102],如图 4 (d)所示,该器械利用刚性杆机构进行直接传动,其缺点是造成电机空间布置松散,器械体积偏大.

|
图 4 多关节手术器械 Figure 4 Multi-joints surgery instruments |
天津大学的“妙手”显微外科手术机器人系统,设计了五自由度微器械[103-104],提高了手术器械的灵活度,如图 4(e)所示.为了解决手术器械腕部关节与钳爪之间的运动耦合问题,哈尔滨工业大学研制了一种基于行星轮系的四自由度手术器械[105],该手术器械只对传动系统的机械精度提出要求,安全性与可靠性高,如图 4(f)所示.上海交通大学研制了一种滑轮传动的手术器械,通过采用不同直径的滑轮实现减速和运动传递[106],如图 4(g)所示.
上述多关节手术器械直径较小,灵活度和精度较高,使用可靠.
5.2 连续体机构手术器械德国Eberhard Karls大学开发了ARTEMIS微创手术机器人[107],如图 5 (a),该机器人采用直径10 mm的蛇形连续体机构作为手术器械,前端为钢丝驱动的二自由度偏转单元,可以绕过障碍物完成手术操作. da Vinci微创手术机器人同样使用了连续体机构手术器械[108],如图 5(b),该类器械的偏转单元为转动连接的碟片,利用穿过碟片的钢丝绳进行驱动,可以实现末端二自由度的转动;与传统手术工具相比,该结构简化了传动系统,同时延长了使用寿命,安全手术次数由10上升至20次.美国哥伦比亚大学研制了一款应用于单孔手术机器人的手术器械IREP[109-110],如图 5(c),IREP可以通过一个直径15 mm的戳卡插入腹部,并使用21个驱动关节来控制两个灵巧的手臂和一个三维视觉模块.伦敦帝国理工学院研制了一种七自由度铰接式手术器械,应用于经肛显微微创手术机器人系统[111],如图 5(d).上海交通大学研制了一种内窥镜无创手术系统[112],如图 5(e),系统前端的内窥镜镜体、摄像照明模块及功能机械臂的伸缩和转弯可以由后端的控制部分实现,使手术器械能够到达指定的部位并开展操作.

|
图 5 连续体机构手术器械 Figure 5 Surgery instruments of continuum mechanism |
由此可以看出,连续体机构手术器械的优点是能简化结构,减小直径,增加灵活度.然而,其低刚度的缺点同样限制了该机构的应用范围.
5.3 手术器械力感知技术在微创手术中,为了便于医生鉴别组织的物理特性,需要在手术器械上安装力传感器[113-114],实现对力的感知,并将获取的力信息通过机器人系统传递到主手操作端,施加给医生实现力反馈.目前,已研制的力感知手术器械如图 6所示.

|
图 6 力感知手术器械 Figure 6 Force perceptive surgery instruments |
适用于微创手术环境的力检测方法分为直接、间接检测两种.直接检测,即设计能集成在手术器械上的微型力传感器进行直接检测,通常使用电阻或光纤传感器作为检测元件.
华盛顿大学研制了一款应用于手术机器人的抓持器[115],如图 6(a)所示.抓持器利用偏带轮带动连杆机构进行直线运动,实现末端钳爪的开合,应变计粘贴在偏带轮上进行力测量.慕尼黑工业大学研制了一套具有力检测功能的手术器械[116],如图 6(b)所示, 应变计直接粘贴在距离钳爪很近的器械轴上,能避免由于摩擦等问题带来的误差.约翰霍普金斯大学研制了一种具有三自由度力检测功能的夹持器[117],如图 6(c)所示, 在一只钳爪上布置了两组应变计检测手术器械受到的垂直于轴线方向的两个力分量,另一只钳爪上布置一组应变计检测轴向力分量,精度较高.德国宇航中心研制的微创手术器械采用了自制的铝合金六足并联结构六维力/力矩传感器,同时满足了测量灵敏度和结构刚度的要求[118-119],如图 6(d)所示.意大利的比萨圣安娜高等学校研发的遥操作微夹钳能够检测微夹钳与小样本组织之间的接触力,及微小脉管的脉动[120]; 微夹钳采用压电驱动器驱动,结构为挠性可变形结构,应变片的安排能最大程度抑制温度漂移,如图 6(e)所示.加拿大的西安大略大学研发的六维力感知手术器械,如图 6(f)所示,其采用直线电机作为驱动元件,由一系列中空管将运动传递给末端钳爪[121].哈尔滨工业大学研制了可以应用于微创手术机器人手术器械的微型力传感器[105],如图 6(g)所示,采用粘贴有应变计的新型弹性铰链Stewart结构检测三维正交力分量的大小和方向.
鲁汶大学将光学力传感器应用于微创外科手术机器人系统[122],如图 6(h)所示.在该系统中,光学传感器安装于手术器械轴,其与轴接触部分为一个柔性钛合金结构.通过3个圆周均布的光位移传感器可以测出该结构受力产生的变形,从而得出所受力的大小.德国宇航中心研制了一种应用于微创手术机器人的光纤力/力矩传感器[123],如图 6(i)所示,传感器外径为6.4 mm,长度为6.5 mm,被安装在手术器械前端,在腹腔内进行力测量.
5.3.2 基于间接检测原理的力感知技术间接检测,即通过测量位移或执行器输入量来计算作用力的大小.通过建立精确的数学模型,使用观测器及自适应控制器估计交互作用力.
英国国王大学提出了一种结合视觉的力感知实现方式,如图 6(j)所示,结合特征的受力情况和内窥镜视野内组织的变形,推测计算组织受到的力[124].德雷赛尔大学研制了一套微创手术夹持器[124],夹持器关节由直流伺服电机驱动,通过丝传动实现钳爪运动,如图 6(k)所示.系统经过标定后,即可通过测量电机的电枢电流计算夹持力.东京工业大学设计的力感知手术钳采用伺服气缸进行驱动,并采用丝传动[125],如图 6(l)所示.该研究采用干扰观测器获得各气缸的压差、关节位移和关节速度等信息,通神经网络获取手术钳动力学模型,计算获得交互作用力.
综上所述,采用直接获取力感知的方法,当检测位置距离末端较远时,需要进行摩擦力和重力补偿,并消除因为安装间隙带来的误差,以提高测量精度;而当检测位置距离末端较近时,还需要考虑生物兼容性和可消毒性.间接式力感知方法需要消除非线性项对计算结果的影响,对系统建模的精度要求较高.
6 微创手术机器人其它技术为了提高微创外科手术机器人的可操作性,许多研究机构将新兴技术与微创手术机器人技术相结合,推动了微创外科手术机器人技术的发展.
6.1 增强现实技术(AR)目前, 机器人辅助微创手术中,医生会结合术前的医学影像,建立患者病灶区域三维模型,进行手术方案规划.随着增强现实技术的发展,将该技术结合到手术机器人系统,使患者术前的3D模型叠加到实时手术操作视野中,可以实现机器人微创手术实时导航,并获取病灶区域组织的内部结构,提高微创外科手术的操作精度和安全性.增强现实的实现依赖于准确的组织建模和配准.其中,配准过程可以由医生根据经验手动实现或自动完成.法国学者提出,在建立三维模型时去除关注组织之外的其他部分,用于降低三维建模的难度,提高配准精确度,更好地将医生的经验知识应用到增强现实的过程中[126].美国约翰霍普金斯大学采用增强现实的方法,将重建的三维组织结合到图像处理软件中[127],系统能够实现组织硬块的跟踪,并通过设定危险区域,实现对手术器械运动范围的约束.
6.2 半自主手术技术腹部软组织较多,解剖信息复杂,手术操作对医生经验依赖程度较高.研究人员尝试利用机器人的精确度和灵活度高的特点,让机器人独立完成难度较低,重复性高的工作,降低医生的工作强度.
多伦多大学研制了一种能独立完成缝合的单臂机器人系统[128].系统基于三维内窥镜追踪,能在体膜上按照医生预定的针入口和针出口实现缝合.加州大学伯克利分校针对清创术研制了基于三维视觉的“观察学习法”,即将清创术分为若干个子任务,并通过过程学习依次实现子任务,从而完成全部清创过程[129].东京医科大学提出了一种基于力估计的单手缝合系统[130], 该系统由一个主手控制两个从手,医生操作一个主手主动控制一个从手进行针缝合动作,另一个从手根据力估计的方法判断插入过程,跟随主动从手进行缝合动作.
6.3 手术训练系统与传统的微创手术不同,医生需要经过专业训练,才能开展机器人辅助微创外科手术.目前一般的训练方法有3种.第一种是利用微创手术机器人进行体模操作训练,即使用简单的、无生命的“盒子训练器”进行基础训练,提升操作熟练度[131-132].另外两种是虚拟现实(VR)法和活体动物组织实验法.虚拟现实法中,使用者操作主手控制虚拟手术器械对虚拟对象进行操作,与实际情况贴合较紧;而活体动物组织实验则由操作者控制主手在活体动物组织上进行手术操作,能更加直观地表现出训练结果[133].
直觉外科手术机器人公司针对da Vinci手术系统设计了训练系统Technology Training Pathway.在经验丰富的培训医师指导下,利用该系统可以学习手术机器人的操作方法.日本九州大学利用球填充模型研制了da Vinci手术系统训练模拟器,其中商用主手PHANToM作为输入端,可以实现操作者对虚拟器械的控制,完成虚拟手术[134].美国宾夕法尼亚大学研制了带力反馈的腕式da Vinci手术机器人训练系统[124].美国加州大学洛杉矶分校研制了一款名为Laparobot的远程操作机器人[135],能消除由于设施不便造成的无法进行动物活体组织实验的限制,实现远程的动物活体组织实验训练.
7 发展趋势微创外科手术机器人作为一个集机械、电子、医学等多学科交叉新兴研究方向,成为推动现代外科医学技术变革的巨大原动力,使外科手术朝着微创、精准、智能化方向发展.
微创手术机器人的小型化和轻型化是其未来发展的趋势.研究结构紧凑、小巧、模块化的新型从操作手臂,在保持较大运动空间的基础上,使其具有较好的刚度及较高的运动分辨率,满足微创手术需要.同时,单孔微创手术机器人、经自然腔道内窥镜手术机器人、体内微创手术机器人已经得到了广泛的关注,将成为微创外科手术机器人发展的新方向.质量轻、刚度高,且与人体不易产生生理排斥的材料也是重要的关注方向,最后在安全性、精度及质量、尺寸上找到一个平衡点.
随着高速远程通信技术、全息影像技术、新电子技术和计算机多媒体技术的快速发展,将使得微创外科手术机器人的远程医疗技术成为其未来发展的趋势.远程微创外科手术机器人技术可以实现远程外科手术,打破地域限制,使社会医疗资源得到充分共享.同时,合理利用手术数据对医生虚拟练习有一定的指导作用.
微创外科手术机器人主要基于视觉反馈来进行微创手术操作,反馈信息单一,不能获取同开放式手术相同的临场感受.随着传感器技术、医学图像信息技术、虚拟现实技术的发展,基于多感知信息人机交互控制技术成为未来发展趋势,使操作者能够获取临床手术视觉、力觉、触觉等信息,增强医生实施手术临场感.多感知信息的融合有利于医生操作的判断,且更适合于手术智能化的发展.
在微创外科手术中,由于无法获取病灶及周边组织内部结构,医生容易对重要组织造成损伤.为实现精准手术,融合术前多模态医学图像信息手术导航技术与术中增强现实技术,可以在术前引导医生进行准确的手术规划,以及术中对病灶组织进行精准识别与治疗.在增强现实技术下,不仅要求对病灶组织位置进行识别,同时其物理特性、生物组织材料特性均需展现出来,引导机器人实现正确操作.
微创外科手术机器人智能化控制技术是其未来发展的趋势,基于视觉信息的手术器械自动跟踪技术、基于先验知识的器官运动跟踪与补偿技术、基于虚拟导向和安全屏障的自动导航技术以及基于医疗机器人局部自主作业技术能够提升微创外科手术机器人的智能程度,进一步提高机器人微创外科手术的有效性和安全性,最大限度地减轻操作者的劳动强度.
8 结论与展望本文对微创外科手术机器人发展现状进行了综述,重点论述了从操作手臂设计、控制结构与控制方法、力反馈主手、手术器械及力感知、增强现实、半自主手术、手术训练系统等微创外科手术机器人关键技术,得到了以下结论:
1) 目前,美国对微创外科手术机器人技术的研究处于世界领先水平,直觉外科手术机器人公司的da Vinci手术机器人在世界范围内得到了广泛的应用.我国微创外科手术机器人技术的研究处于迅猛发展的阶段,但还没有商品化的系统.
2) 微创外科手术机器人构型主要分为一体式和分体式两种.设计结构精巧、运动精确、安全性高的远心定位机构是从操作手臂研究的重点.
3) 基于分布式实时通讯的控制系统实时性高,结构简单,可靠性高,广泛应用于微创外科手术机器人.同时,通过反向驱动控制、视觉临场感主从及辅助控制、震动抑制控制等技术提高微创外科手术机器人的可操作性、精确性.
4) 考虑微创外科手术机器人的柔性关节设计,传统基于刚性机器人的PID控制算法不能满足微创手术机器人高精度和平稳的控制需求,具有滚动优化、反馈校正、约束处理和实时执行特性的算法将得到广泛的研究和应用.
5) 应用于机器人微创外科手术的力反馈主手要求工作空间大,灵活性高,并且具有重力补偿、自动校准及力反馈功能.
6) 用于机器人微创外科手术的手术器械主要包括多关节手术器械和连续体机构手术器械.手术器械需具有体积小、精度高、易消毒、良好生物兼容性等特点.为了实现临场力反馈,具有力感知的手术器械成为了研究热点,但目前还没有具备力反馈的商用手术器械.
7) 增强现实技术、半自主手术技术、手术训练系统等微创外科手术机器人辅助技术,可以提高手术安全性和操作精度,减轻医生操作负担,由于上述技术在微创手术机器人领域的巨大应用前景,已成为微创外科手术机器人领域的研究热点.
| [1] |
刘达, 王田苗, 张玉茹, 等. 面向微创手术的医疗外科机器人构型综合[J]. 机器人, 2003, 25(2): 132. DOI:10.3321/j.issn:1002-0446.2003.02.009 |
| [2] |
林良明. 机器人辅助微创外科手术的发展[J]. 中国医疗器械信息, 2003, 9(2): 16. DOI:10.3969/j.issn.1006-6586.2003.02.004 |
| [3] |
冯美.腹腔微创手术机器人系统关键技术研究[D].哈尔滨: 哈尔滨工业大学, 2012
|
| [4] |
HARRIS S J, ARAMBULACOSIO F, MEI Q, et al. The probot:an active robot for prostate resection[J]. Journal of Engineering in Medicine, 1997, 211(4): 317. DOI:10.1243/0954411971534449 |
| [5] |
BOURGER F, DOIGNON C, ZANNE P, et al. A model-free vision-based robot control for minimally invasive surgery using ESM tracking and pixels color selection[C]// IEEE International Conference on Robotics and Automation. Rome: IEEE, 2007: 3579. DOI: 10.1109/ROBOT.2007.364026
|
| [6] |
DANKELMAN J. Surgical robots and other training tools in minimally invasive surgery[C]// IEEE International Conference on Systems, Man and Cybernetics. The Hague: IEEE, 2004: 2459. DOI: 10.1109/ICSMC.2004.1400699
|
| [7] |
GHODOUSSI M, BUTNER S E, WANG Y. Robotic surgery-the transatlantic case[C]// IEEE International Conference on Robotics and Automation. Washington, DC: IEEE, 2002: 1882. DOI: 10.1109/ROBOT.2002.1014815
|
| [8] |
GINHOUX R, GANGLOFF J, MATHELIN M D, et al. Active filtering of physiological motion in robotized surgery using predictive control[J]. IEEE Transactions on Robotics, 2005, 21(1): 67. DOI:10.1109/TRO.2004.833812 |
| [9] |
RUURDA J P, VAN VROONHOVEN T J, BROEDRERS I A. Robot-assisted surgical systems: a new era in laparoscopic surgery[J]. Annals of the Royal College of Surgeons of England, 2002, 84(4): 223. DOI:10.1308/003588402320439621 |
| [10] |
NOONAN D P, MYLONAS G P, DARZI A, et al. Gaze contingent articulated robot control for robot assisted minimally invasive surgery[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice: IEEE, 2008: 1186. DOI: 10.1109/IROS.2008.4651105
|
| [11] |
GUTHART G S, SALISBURY J J. The intuitive/sup TM/ telesurgery system: overview and application[C]// IEEE International Conference on Robotics and Automation. San Francisco: IEEE, 2000: 618. DOI: 10.1109/ROBOT.2000.844121
|
| [12] |
GULATI S, JUNG E H, KAPOOR C. Execution engine for robotic surgery support functions in an unmanned operating room[C]// International Symposium on Computational Intelligence in Robotics and Automation. Jacksonville: IEEE, 2007: 404. DOI: 10.1109/CIRA.2007.382913
|
| [13] |
MORELLI L, GUADAGNI S, DI FRANCE G, et al. Use of the new da Vinci Xi® during robotic rectal resection for cancer: a pilot matched-case comparison with the da Vinci Si®[J/OL]. International Journal of Medical Robotics and Computer Assisted Surgery, 2017, 13(1). http://onlinelibrary.wiley.com/doi/10.1002/rcs.1728. DOI: 10.1002/rcs.1728
|
| [14] |
DARWICHE F, SWAIN S, KALLINGAL G, et al. Operative technique and early experience for robotic-assisted laparoscopic nephroureterectomy (RALNU) using da Vinci Xi[J]. Springerplus, 2015, 4(1): 1. DOI:10.1186/s40064-015-1076-6 |
| [15] |
HANNAFORD B, ROSEN J, FRIEDMAN D W, et al. Raven-Ⅱ: an open platform for surgical robotics research[J]. IEEE Transactions on Biomedical Engineering, 2013, 60(4): 954. DOI:10.1109/TBME.2012.2228858 |
| [16] |
LEWIS A, HANNAFORD B. Dynamically evaluated gravity compensation for the RAVEN surgical robot[C]// IEEE International Conference on Robotics and Automation. Hong Kong: IEEE, 2013: 2534. DOI: 10.1109/ICRA.2014.6907213
|
| [17] |
VELASQUEZ C A, KING H H, HANNAFORD B, et al. Development of a flexible imaging probe integrated to a surgical telerobot system: preliminary remote control test and probe design[C]// IEEE Ras & Embs International Conference on Biomedical Robotics and Biomechatronics. Rome: IEEE, 2012: 894. DOI: 10.1109/BioRob.2012.6290880
|
| [18] |
MEENINK T. Vitreo-retinal eye surgery robot: sustainable precision[D]. Eindhoven: Technische Universit Eindhoven, 2011
|
| [19] |
ROSIELLE P. Robotically assisted eye surgery: a haptic master console[D]. Eindhoven: Technische Universit Eindhoven, 2011
|
| [20] |
HAGN U, KONIETSCHKE R, TOBERGTE A, et al. DLR mirosurge: a versatile system for research in endoscopic telesurgery[J]. International Journal of Computer Assisted Radiology and Surgery, 2010, 5(2): 183. DOI:10.1007/s11548-009-0372-4 |
| [21] |
HAGN U, NICKL M, JORG S, et al. The DLR MIRO: a versatile lightweight robot for surgical applications[J]. Industrial Robot, 2008, 35(4): 324. DOI:10.1108/01439910810876427 |
| [22] |
KONIETSCHKE R, HAGN U, NICKL M, et al. The DLR mirosurge-a robotic system for surgery[C]// IEEE International Conference on Robotics and Automation. Kobe: IEEE, 2009: 1589. DOI: 10.1109/ROBOT.2009.5152361
|
| [23] |
GUELI A S, ROSSITTO C, CIANCI S, et al. The SenhanceTM surgical robotic system ("Senhance") for total hysterectomy in obese patients: a pilot study[J]. Journal of Robotic Surgery, 2017(8): 1. DOI:10.1007/s11701-017-0718-9 |
| [24] |
JIN H L, LEE W J, DONG W P, et al. Robotic cholecystectomy using Revo-i Model MSR-5000, the newly developed Korean robotic surgical system: a preclinical study[J]. Surgical Endoscopy, 2017, 31(8): 3391. DOI:10.1007/s00464-016-5357-0 |
| [25] |
ABDEL R A, TROYA I S, KIM D K, et al. Robot-assisted fallopian tube transection and anastomosis using the new REVO-I robotic surgical system: feasibility in a chronic porcine model[J]. BJU International, 2016, 118(4): 604. DOI:10.1111/bju.13517 |
| [26] |
KIM D K, PARK D W, RHA K H. Robot-assisted partial nephrectomy with the REVO-I robot platform in porcine models[J]. European Urology, 2015, 69(3): 541. DOI:10.1016/j.eururo.2015.11.024 |
| [27] |
TANG A, CAO Q, TAN H, et al. Motion control of a master-slave minimally invasive surgical robot based on the hand-eye-coordination[C]// Computer Aided Surgery. Tokyo: Waseda University, 2016: 57. DOI: 10.1007/978-4-431-55810-1_5
|
| [28] |
WANG W, LI J, WANG S, et al. System design and animal experiment study of a novel minimally invasive surgical robot[J]. International Journal of Medical Robotics and Computer Assisted Surgery Mrcas, 2016, 12(1): 73. DOI:10.1002/rcs.1658 |
| [29] |
NIU G, PAN B, AI Y, et al. Intuitive control algorithm of a novel minimally invasive surgical robot[J], 2016, 21(sup1): 92. DOI: 10.1080/24699322.2016.1240296
|
| [30] |
FENG M, FU Y, PAN B, et al. Development of a medical robot system for minimally invasive surgery[J]. International Journal of Medical Robotics and Computer Assisted Surgery Mrcas, 2012, 8(1): 85. DOI:10.1002/rcs.440 |
| [31] |
杜志江, 王伟, 闫志远, 等. 基于模糊强化学习的微创外科手术机械臂人机交互方法[J]. 机器人, 2017, 39(3): 363. |
| [32] |
PISLA D, SZILAGHYI A, VAIDA C, et al. Kinematics and workspace modeling of a new hybrid robot used in minimally invasive surgery[J]. Robotics and Computer Integrated Manufacturing, 2013, 29(2): 463. DOI:10.1016/j.rcim.2012.09.016 |
| [33] |
LI Z, GLOZMAN D, MILUTINOVIC D, et al. Maximizing dexterous workspace and optimal port placement of a multi-arm surgical robot[C]// IEEE International Conference on Robotics and Automation. Shanghai: IEEE, 2011: 3394. DOI: 10.1109/ICRA.2011.5980270
|
| [34] |
孔康, 王树新, 张淮锋, 等. 紧凑型微创手术机器人的设计与实现[J]. 天津大学学报(自然科学与工程技术版), 2017, 50(11): 1131. |
| [35] |
桑宏强.基于模型的微创手术机器人力检测技术研究[D].天津: 天津大学, 2011 https://www.wenkuxiazai.com/doc/2629b6c2a1c7aa00b52acb61.html
|
| [36] |
JONES D, LEWIS A, FISCHER G S. Development of a standalone surgical haptic arm[C]//Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBC. Bodton: IEEE, 2011: 2136. DOI: 10.1109/IEMBS.2011.6090399
|
| [37] |
SIMOROV A, OTTE R S, KOPIETZ C M, et al. Review of surgical robotics user interface: what is the best way to control robotic surgery?[J]. Surgical Endoscopy, 2012, 26(8): 2117. DOI:10.1007/s00464-012-2182-y |
| [38] |
TAYLOR G W, BARRIE J, HOOD A, et al. Surgical innovations: addressing the technology gaps in minimally invasive surgery[J]. Trends in Anaesthesia and Critical Care, 2013, 3(2): 56. DOI:10.1016/j.tacc.2013.01.004 |
| [39] |
TOBERGTE A, HELMER P, HAGN U, et al. The Sigma.7 haptic interface for MiroSurge: A new bi-manual surgical console[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco: IEEE, 2011: 3023. DOI: 10.1109/IROS.2011.6094433
|
| [40] |
NAWRAT Z, KOSTKA P. Robin heart surgery robotic system. Challenges in mechanical construction, control system and stuff training before first clinical application[J]. Archive of Mechanical Engineering, 2014, 61(1): 163. DOI:10.2478/meceng-2014-0010 |
| [41] |
NIEWOLA, PODSEDKOWSKI L, WROBLEWSKI P, et al. Selected aspects of robin heart robot control[J]. Archive of Mechanical Engineering, 2013, 60(4): 575. DOI:10.2478/meceng-2013-0035 |
| [42] |
NICCOLINI M, PETRONI G, MENCIASSI A, et al. Real-time control architecture of a novel Single-Port lapaRoscopy bimaNual robot T(SPRINT)[C]// IEEE International Conference on Robotics and Automation. [S.l.]: IEEE, 2012: 3395. DOI: 10.1109/ICRA.2012.6224984
|
| [43] |
PICCIGALLO M, SCARFOGLIERO U, QUAGLIA C, et al. Design of a novel bimanual robotic system for single-port laparoscopy[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(6): 871. DOI:10.1109/TMECH.2010.2078512 |
| [44] |
SANCHEZ L A, PETRONI G, PICCIGALLO M, et al. Real-time control and evaluation of a teleoperated miniature arm for single port laparoscopy[C]//Conference of the IEEE Engineering in Medicine and Biology Society, EMBS. Boston: IEEE, 2011(10): 7049. DOI: 10.1109/IEMBS.2011.6091782
|
| [45] |
BAI W, CAO Q, WANG P, et al. Modular design of a teleoperated robotic control system for laparoscopic minimally invasive surgery based on ROS and RT-Middleware[J]. Industrial Robot, 2017, 44(5): 596. DOI:10.1108/IR-12-2016-0351 |
| [46] |
唐奥林.面向主从式微创外科手术机器人的遥操作运动控制策略研究[D].上海: 上海交通大学, 2014 http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y2765325
|
| [47] |
AI Y, PAN B, FU Y, et al. Control system design for a novel minimally invasive surgical robot[J]. Computer Assited Surgery, 2016, 21(sup1): 45. DOI:10.1080/24699322.2016.1240313 |
| [48] |
AI Y, PAN B, FU Y, et al. Design of a novel robotic system for minimally invasive surgery[J]. Industrial Robot, 2017, 44(3): 288. DOI:10.1108/IR-07-2016-0181 |
| [49] |
ISHIDA T, TAKANISHI A. A robot actuator development with high backdrivability[C]// 2006 IEEE Conference on Robotics, Automation and Mechatronics. Bangkok: IEEE, 2006: 1. DOI: 10.1109/RAMECH.2006.252631
|
| [50] |
NOWLIN W C, MOHR P W, SCHENA B M, et al. Software center and highly configurable robotic systems for surgery and other uses: US 8786241 B2[P]. 2014
|
| [51] |
CHANDRASEKARAN K, SIVARAMAN S, THONDIYATH A. Static balancing and inertia compensation of a master manipulator for tele-operated surgical robot application[C]// Proceedings of the 2015 Conference on Advances In Robotics. Goa: Association for Computing Machiney, 2015: a14. DOI: 10.1145/2783449.2783463
|
| [52] |
WEISS P, ZENKER P, MAEHLE E. Feed-forward friction and inertia compensation for improving backdrivability of motors[C]// International Conference on Control Automation Robotics and Vision. Guangzhou: IEEE, 2013: 288. DOI: 10.1109/ICARCV.2012.6485173
|
| [53] |
PRISCO G, ROSA D J. Robotic surgical system with joint motion controller adapted to reduce instrument tip vibrations: US 12703399[P]. 2010
|
| [54] |
AI Y, PAN B, NIU G, et al. Master-slave control technology of isomeric surgical robot for minimally invasive surgery[C]// IEEE International Conference on Robotics and Biomimetics. Qingdao: IEEE, 2017: 2134. DOI: 10.1109/ROBIO.2016.7866645
|
| [55] |
GUNTER D, NIEMEYER M V. Aspects of a control system of a minimally invasive surgical apparatus: US 10871467[P]. 2005
|
| [56] |
GHORBEL F, HUNG J Y, SPOMG M W. Adaptive control of flexible-joint manipulators[J]. IEEE Control Systems Society, 1990, 9(7): 9. DOI:10.1016/0167-6911(89)90016-9 |
| [57] |
GE S Z S. Adaptive controller design for flexible joint manipulators[J]. Automatica, 1996, 32(2): 273. DOI:10.1016/0005-1098(96)85559-2 |
| [58] |
CHANG T K, SPOWAGE A, CHAN K Y. Review of control and sensor system of flexible manipulator[J]. Journal of Intelligent and Robotic Systems, 2015, 77(1): 187. DOI:10.1007/s10846-014-0071-4 |
| [59] |
SINGER N C, SEERING W P. Preshaping command inputs to reduce system vibration[M]. Massachusetts: Massachusetts Institute of Technology, 1990: 76. DOI:10.1115/1.2894142
|
| [60] |
WAPENHANS H, HOLZL J, STEINLE J, et al. Optimal trajectory planning with application to industrial robots[J]. International Journal of Advanced Manufacturing Technology, 1994, 9(1): 49. DOI:10.1007/BF01792867 |
| [61] |
SONG S J, MOON Y, LEE D H, et al. Comparative study of fuzzy PID control algorithms for enhanced position control in laparoscopic surgery robot[J]. Journal of Medical and Biological Engineering, 2015, 35(1): 34. DOI:10.1007/s40846-015-0003-1 |
| [62] |
SONG S J, PARK J W, SHIN J W, et al. A comparative study of fuzzy PID control algorithm for position control performance enhancement in a real-time OS based laparoscopic surgeryrobot[J]. Transactions of the Korean Institute of Electrical Engineers, 2008, 57(3): 1090. DOI:10.1007/978-3-540-92841-6_268 |
| [63] |
BOLEA Y, DOT P, PUJOL D, et al. A parametric robust approach PID control for a laparoscopic surgery robot[C]// Proceedings of the 16th IFAC World Congress. [S.l.]: IFAC Secretariat, 2005: 121
|
| [64] |
SPOMG M, KHORASANI K, KOKOTOVIC P. An integral manifold approach to the feedback control of flexible joint robots[J]. IEEE Journal on Robotics and Automation, 1987, 3(4): 291. DOI:10.1109/JRA.1987.1087102 |
| [65] |
SPONG M W. Modeling and control of elastic joint robots[J]. ASME Journal of Dynamic Systems, Measurement, and Control, 1987, 109(4): 310. DOI:10.1115/1.3143860 |
| [66] |
YUAN J, STEPANENKO Y. Composite adaptive control of flexible joint robots[J]. Automatica, 1993, 29(3): 609. DOI:10.1016/0005-1098(93)90058-2 |
| [67] |
ZOU S, PAN B, FU Y, et al. An adaptive fuzzy sliding mode control for minimally invasive surgical robot's remote center mechanisms[C]// IEEE International Conference on Information and Automation. Hailar: IEEE, 2014: 102. DOI: 10.1109/ICInfA.2014.6932634
|
| [68] |
AHMAD M A, SUID M H, RAMLI M S, et al. PD fuzzy logic with non-collocated PID approach for vibration control of flexible joint manipulator[C]// International Colloquium on Signal Processing and ITS Applications. Mallaca City: IEEE, 2010: 1. DOI: 10.1109/CSPA.2010.5545243
|
| [69] |
ZOU S, PAN B, FU Y, et al. Extended high-gain observer based adaptive control of flexible-joint surgical robot[C]// IEEE International Conference on Robotics and Biomimetics. Qingdao: IEEE, 2017: 2128. DOI: 10.1109/ROBIO.2016.7866644
|
| [70] |
CAMACHO E F, BORDONS C. Model predictive control[J]. Journal of Control Science and Engineering, 2012(8): 5. DOI:10.1002/9781119941446.ch3 |
| [71] |
RICHLET J, O'DONOVAN D. Elementary predictive functional control: a tutorial[C]// International Symposium on Advanced Control of Industrial Processes. Hangzhou: IEEE, 2011: 306
|
| [72] |
KUNTZE H B, JACUBASCH A, RICHALET J, et al. On the predictive functional control of an elastic industrial robot[C]// IEEE Conference on Decision and Control. Athens: IEEE, 1986: 1877.DOI: 10.1109/CDC.1986.267314
|
| [73] |
RICHALET J, ATA-DOSS S A E, ARBER C, et al. Predictive functional control-application to fast and accurate robots[J]. IFAC Proceedings Volumes, 1987, 20(5): 251. DOI:10.1016/S1474-6670(17)55325-2 |
| [74] |
KUNTZE H B, JACUBASCH A, HIRSCH U, et al. On the application of a new method for fast and robust position control of industrial robots[C]// IEEE International Conference on Robotics and Automation. Philadelphia: IEEE, 1988: 1574. DOI: 10.1109/ROBOT.1988.12290
|
| [75] |
BOWTHORPE M, TAVAKOLI M. Generalized predictive control of a surgical robot for beating-heart surgery under delayed and slowly-sampled ultrasound image data[J]. IEEE Robotics and Automation Letters, 2017, 1(2): 892. |
| [76] |
DOMINICI M, CORTESAO R. Model predictive control architectures with force feedback for robotic-assisted beating heart surgery[C]// IEEE International Conference on Robotics and Automation. Hong Kong: IEEE, 2014: 2276. DOI: 10.1109/ICRA.2014.6907174
|
| [77] |
RAIBERT M H, CRAIG J J. Hybrid position/force control of manipulators[J]. Journal of Dynamic Systems Measurement and Control, 1981, 103(2): 126. DOI:10.1115/1.3139652 |
| [78] |
HOGAN N. Impedance control-an approach to manipulation. Ⅰ-theory. Ⅱ-implementation. Ⅲ-applications[J]. Trans the ASME Journal of Dynamic Systems, Measurement, and Control, 1985, 107(1): 304. DOI:10.1115/1.3140713 |
| [79] |
KIM P C W, KIM Y, CHENG P, et al. Hybrid control surgical robotic system: WO/2014/121262[P]. 2014
|
| [80] |
HAIDEGGER T, BENYÓ B, KOVÁCS L, et al. Force sensing and force control for surgical robots[J]. IFAC Proceedings Volumes, 2009, 42(12): 401. DOI:10.3182/20090812-3-DK-2006.00070 |
| [81] |
ZEMITI N, ORTMAIER T, VITRANI M A, et al. A force controlled laparoscopic surgical robot without distal force sensing[C]//Springer Tracts in Advanced Robotics. Experimental Robotics IX: The 9th International Symposium on Experimental Robotics. Singapore: Springer Verlag, 2006: 153. DOI: 10.1007/11552246_15
|
| [82] |
RICHMOND G F, GUTHART G S. Grip force control for robotic surgical instrument end effector: US2018055587-A1.[P].2014
|
| [83] |
LUO R C, CHEN J W, YI W P. Robotic endoscope system with compliance effect including adaptive impedance and velocity control for assistive laparoscopic surgery[C]// Tokyo: IEEE, 2010: 100. DOI: 10.1109/BIOROB.2010.5626939
|
| [84] |
SALISBURY K J, MADHANI A J, GUTHART G S, et al. Master having redundant degrees of freedom: US20020121283[P]. 2004
|
| [85] |
WANG T, PAN B, FU Y, et al. Design of a new haptic device and experiments in minimally invasive surgical robot[J]. Computer Assisted Surgery, 2017, 22(sup1): 240. DOI:10.1080/24699322.2017.1389402 |
| [86] |
LI J, ZHOU N, WANG S, et al. Design of an integrated master-slave robotic system for minimally invasive surgery[J]. International Journal of Medical Robotics and Computer Assisted Surgery(MRCAS), 2012, 8(1): 77. DOI:10.1002/rcs.439 |
| [87] |
BASSAN H, TALASAZ A, PATEL R V. Design and characterization of a 7-DOF haptic interface for a minimally invasive surgery test-bed[J]. IEEE/RSJ International Conference on Intelligent Robots and Systems. St. Louis: IEEE Computer Society, 2009, 4098. DOI:10.1109/IROS.2009.5354211 |
| [88] |
GOSSELIN F, BIDARD C, BRISSET J. Design of a high fidelity haptic device for telesurgery[C]// IEEE International Conference on Robotics and Automation. Barcelona: IEEE, 2006: 205. DOI: 10.1109/ROBOT.2005.1570120
|
| [89] |
TAHMASEBI A M, TAATI B, MOBASSER F, et al. Dynamic parameter identification and analysis of a phantom haptic device[C]// IEEE Conference on Control Applications. Toronto: IEEE, 2005: 1251. DOI: 10.1109/CCA.2005.1507303
|
| [90] |
MASHAYEKHI A, NAHVI A, YAZDANI M, et al. VirSense: a novel haptic device with fixed-base motors and a gravity compensation system[J]. Industrial Robot, 2014, 41(1): 37. DOI:10.1108/IR-02-2013-328 |
| [91] |
BAUMANN R, CLAVEL R. Haptic interface for virtual reality based minimally invasive surgery simulation[C]// IEEE International Conference on Robotics and Automation. Leuven : IEEE, 1998: 381. DOI: 10.1109/ROBOT.1998.676435
|
| [92] |
GOSSELIN F, MARTINS J P, BIDARD C, et al. Design of a new parallel haptic device for desktop applications[C]// Eurohaptics Conference, 2005 and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator System. Pisa: IEEE, 2005: 189. DOI: 10.1109/WHC.2005.33
|
| [93] |
CAMPION G, WANG Q, HAYWARD V. The pantograph mk-Ⅱ: a haptic instrument[M]. London: Springer, 2005: 45. DOI:10.1109/IROS.2005.1545066
|
| [94] |
KIM S, BERKLEY J J, SATO M. A novel seven degree of freedom haptic device for engineering design[J]. Virtual Reality, 2003, 6(4): 217. DOI:10.1007/s10055-003-0105-x |
| [95] |
VAN D L R Q, LAMMERTSE P, FREDERIKSEN E, et al. The haptic master, a new high-performance haptic interface[C/OL]// Eurohaptics Proc. Edinburgh: Eurohaptics Conference. 2002[2018-06-25]. https://core.ac.uk/display/21540534
|
| [96] |
UEBERLE M, MOCK N, BUSS M. Vishard10, a novel hyper-redundant haptic interface[C]// International Conference on Haptic Interfaces for Virtual Environment and Teleoperator Systems. Chicago: IEEE Computer Society, 2004: 58. DOI: 10.1109/HAPTIC.2004.1287178
|
| [97] |
PUERTO M J, SANCHEZ E, GIL J J. Control strategies applied to kinesthetic haptic devices[C]// Robotic Intelligence in Informationally Structured Space. Nashville: IEEE, 2009: 137. DOI: 10.1109/RIISS.2009.4937918
|
| [98] |
PARK H, LEE J M. Adaptive impedance control of a haptic interface[J]. Mechatronics, 2004, 14(3): 237. DOI:10.1016/S0957-4158(03)00040-0 |
| [99] |
BASER O, KONUKSEVEN E I. Utilization of motor current based torque feedback to improve the transparency of haptic interfaces[J]. Mechanism and Machine Theory, 2012, 52(52): 78. DOI:10.1016/j.mechmachtheory.2012.01.012 |
| [100] |
FAUST R A, KANT A J, LORINCZ A, et al. Robotic endoscopic surgery in a porcine model of the infant neck[J]. Journal of Robotic Surgery, 2007, 1(1): 75. DOI:10.1007/s11701-006-0007-5 |
| [101] |
MINOR M, MUKHERJEE R. A dexterous manipulator for minimally invasive surgery[C]// IEEE International Conference on Robotics and Automation. Detroit : IEEE, 1999: 2057. DOI: 10.1109/ROBOT.1999.770410
|
| [102] |
ARATA J, TAKAHASHI H, WARISAWA S I, et al. A remote surgery experiment between Japan-Korea using the minimally invasive surgical system[J]. Jjscas, 2007, 8(4): 257. DOI:10.1109/ROBOT.2006.1641193 |
| [103] |
王树新, 丁杰男, 贠今天, 等. 显微外科手术机器人——"妙手"系统的研究[J]. 机器人, 2006, 28(2): 130. DOI:10.3321/j.issn:1002-0446.2006.02.008 |
| [104] |
何超.微创手术机器人手术工具丝传动设计方法研究[D].天津: 天津大学, 2013 http://cdmd.cnki.com.cn/Article/CDMD-10056-1015019964.htm
|
| [105] |
李坤.微创手术机器人力检测关键技术研究[D].哈尔滨: 哈尔滨工业大学, 2016
|
| [106] |
LI H, LIU W, WANG K, et al. A cable-pulley transmission mechanism for surgical robot with backdrivable capability[J]. Robotics and Computer-Integrated Manufacturing, 2018, 49: 328. DOI:10.1016/j.rcim.2017.08.011 |
| [107] |
SCHURR M O, BUESS G, NEISIUS B, et al. Robotics and telemanipulation technologies for endoscopic surgery[J]. Surgical Endoscopy, 2000, 14(4): 375. DOI:10.1007/s004640020067 |
| [108] |
SONGER M N, GEPHART M P, BERMAN P, et al. Minimally invasive surgical system: US7918878 B2[P]. 2015.
|
| [109] |
DING J, GOLDMAN R E, XU K, et al. Design and coordination kinematics of an insertable robotic effectors platform for single-port access surgery[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(5): 1612. DOI:10.1109/TMECH.2012.2209671 |
| [110] |
DING J, NABIL S. Choice of handedness and automated suturing for anthropomorphic dual-arm surgical robots[J]. Robotica, 2015, 33(8): 1775. DOI:10.1017/S026357471400109X |
| [111] |
SHANG J, LEIBRANDT K, GIATAGANAS P, et al. A single-port robotic system for transanal microsurgery: design and validation[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1510. DOI:10.1109/LRA.2017.2668461 |
| [112] |
徐凯, 赵江然, 郑西点, 等.内窥镜无创手术系统: CN 103315781 A[P]. 2013
|
| [113] |
GIBO T L, BASTIAN A J, OKAMURA A M. Grip force control during virtual object interaction: effect of force feedback, accuracy demands, and training[J]. IEEE Transactions on Haptics, 2014, 7(1): 37. DOI:10.1109/TOH.2013.60 |
| [114] |
XIE H, LIU H, NOH Y, et al. A fiber-optics-based body contact sensor for a flexible manipulator[J]. IEEE Sensors Journal, 2015, 15(6): 354. DOI:10.1109/JSEN.2015.2392384 |
| [115] |
BROWN J D, ROSEN J, KIM Y S, et al. In-vivo and in-situ compressive properties of porcine abdominal soft tissues[J]. Studies in Health Technology and Informatics, 2003, 94(94): 26. DOI:10.3233/978-1-60750-938-7-26 |
| [116] |
MAYER H, GOMEZ F, WIERSTRA D, et al. A system for robotic heart surgery that learns to tie knots using recurrent neural networks[C]// IEEE/rsj International Conference on Intelligent Robots and Systems. Beijing: IEEE, 2006: 543. DOI: 10.1109/IROS.2006.282190
|
| [117] |
FISCHER G S, AKINBIYI T, SAHA S, et al. Ischemia and force sensing surgical instruments for augmenting available surgeon information[C]// IEEE/ras-Embs International Conference on Biomedical Robotics and Biomechatronics. Pisa: IEEE, 2006: 1030. DOI: 10.1109/BIOROB.2006.1639227
|
| [118] |
SEIBOLD U, KUBLER B, HIRZINGER G. Prototype of instrument for minimally invasive surgery with 6-axis force sensing capability[C]// IEEE International Conference on Robotics and Automation. Barcelona: IEEE, 2005: 496. DOI: 10.1109/ROBOT.2005.1570167
|
| [119] |
SEIBOLD U, KUBLER B, PASSIG G, et al. Development of actuated and sensor integrated forceps for minimally invasive robotic surgery[J]. International Journal of Medical Robotics and Computer Assisted Surgery Mrcas, 2010, 1(3): 96. DOI:10.1002/rcs.33 |
| [120] |
MENCIASSI A, EISINBERG A, CARROZZA M C, et al. Force sensing microinstrument for measuring tissue properties and pulse in microsurgery[J]. Mechatronics IEEE/ASME Transactions on, 2003, 8(1): 10. DOI:10.1109/TMECH.2003.809153 |
| [121] |
TAVAKOLI M, PATEL R V, MOALLEM M. Haptic interaction in robot-assisted endoscopic surgery: a sensorized end-effector[J]. International Journal of Medical Robotics and Computer Assisted Surgery(MRCAS), 2010, 1(2): 53. DOI:10.1002/rcs.16 |
| [122] |
PEIRS J, CLIJNEN J, REYNAERTS D, et al. A micro optical force sensor for force feedback during minimally invasive robotic surgery[J]. Sensors and Actuators A Physical, 2004, 115(2): 447. DOI:10.1016/j.sna.2004.04.057 |
| [123] |
MAHVASH M, OKAMURA A. Friction compensation for enhancing transparency of a teleoperator with compliant transmission[J]. IEEE Transactions on Robotics, 2007, 23(6): 1240. DOI:10.1109/TRO.2007.909825 |
| [124] |
FARAGASSO A, BIMBO J, NOH Y, et al. Novel uniaxial force sensor based on visual information for minimally invasive surgery[C]// IEEE International Conference on Robotics and Automation. Hong Kong: IEEE, 2014: 1405. DOI: 10.1109/ICRA.2014.6907036
|
| [125] |
TADANO K, KAWASHIMA K. Development of 4-dofs forceps with force sensing using pneumatic servo system[C]// IEEE International Conference on Robotics and Automation. Orlando: IEEE, 2006: 2250. DOI: 10.1109/ROBOT.2006.1642038
|
| [126] |
SOLER L, DELINGETTE H, MALANDAIN G, et al. Fully automatic anatomical, pathological, and functional segmentation from CT scans for hepatic surgery[J]. Computer Aided Surgery, 2010, 6(3): 131. DOI:10.3109/10929080109145999 |
| [127] |
YAMAMOTO T, ABOLHASSANI N, JUNG S, et al. Augmented reality and haptic interfaces for robot-assisted surgery[J]. International Journal of Medical Robotics and Computer Assisted Surgery, 2012, 8(1): 45. DOI:10.1002/rcs.421 |
| [128] |
IYER S, LOOI T, DRAKE J. A single arm, single camera system for automated suturing[C]// IEEE International Conference on Robotics and Automation. Karlsruhe: IEEE, 2013: 239. DOI: 10.1109/ICRA.2013.6630582
|
| [129] |
MURALI A, SEN S, KEHOE B, et al. Learning by observation for surgical subtasks: multilateral cutting of 3D viscoelastic and 2D orthotropic tissue phantoms[C]// IEEE International Conference on Robotics and Automation. Seattle: IEEE, 2015: 1202. DOI: 10.1109/ICRA.2015.7139344
|
| [130] |
WATANABE K, KANNO T, ITO K, et al. Human-integrated automation of suturing task with one-master two-slave system for laparoscopic surgery[C]// IEEE International Conference on Advanced Intelligent Mechatronics. Banff : IEEE, 2016: 1180. DOI: 10.1109/AIM.2016.7576930
|
| [131] |
HUNG A J, JAYARATNA I S, TERUYA K, et al. Comparative assessment of three standardized robotic surgery training methods[J]. BJU International, 2013, 112(6): 713. DOI:10.1111/bju.12045 |
| [132] |
PETERS J H, FRIED G M, SWANSTROM L L, et al. Development and validation of a comprehensive program of education and assessment of the basic fundamentals of laparoscopic surgery[J]. Surgery, 2004, 135(1): 21. DOI:10.1016/S0039-6060(03)00156-9 |
| [133] |
KORETS R, MUES A C, GRAVERSEN J A, et al. Validating the use of the mimic dV-trainer for robotic surgery skill acquisition among urology residents[J]. Urology, 2011, 78(6): 1326. DOI:10.1016/j.urology.2011.07.1426 |
| [134] |
SUZUKI S, SUZUKI N, HASHIZUME M, et al. Tele-training simulation for the surgical robot system "Da Vinci"[J]. International Congress, 2004, 1268(1): 86. DOI:10.1016/j.ics.2004.03.160 |
| [135] |
ALLEN B F, JORDAN B, PANNELL W, et al. Laparoscopic surgical robot for remote in vivo training[J]. Advanced Robotics, 2010, 24(12): 1679. DOI:10.1163/016918610X522513 |